產品概述
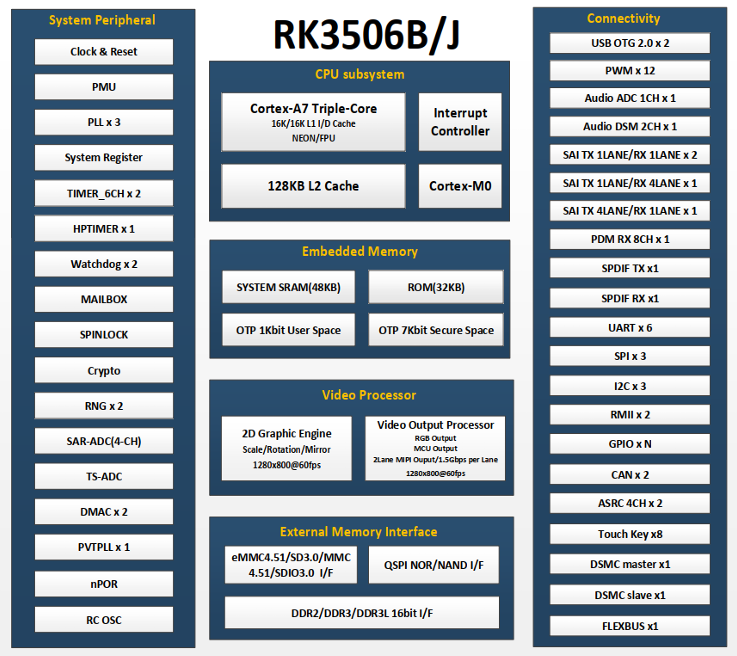
觸覺智能RK3506星閃開發板,型號IDO-EVB3506-V1采用 Rockchip RK3506(三核 Cortex-A7+單核Cortex-M0, 主頻最高1.5GHz)設計的評估開發板,專為家電顯控、顯示HMI、手持終端、工業IOT網關、工業控制、PLC等領域而設計。內置2D硬件引擎和顯示輸出引擎,以最小化CPU負載,滿足圖像顯示需求。 RK3506 SoC 內部組成,如下圖所示:
1.1 產品特點
- 搭載瑞芯微SOC RK3506(三核 Cortex-A7+單核Cortex-M0, 主頻最高1.5GHz);
- 單路MIPI-DSI(2Lane),支持到1280x1280@60fp ;
- 兩路獨立的百兆以太網口;
- 支持星閃無線通信通訊模組;
- Linux全新Kernel6.1內核SDK加持,全面支持Ubuntu、Debian以及Buildroot;
1.2 產品外觀及尺寸
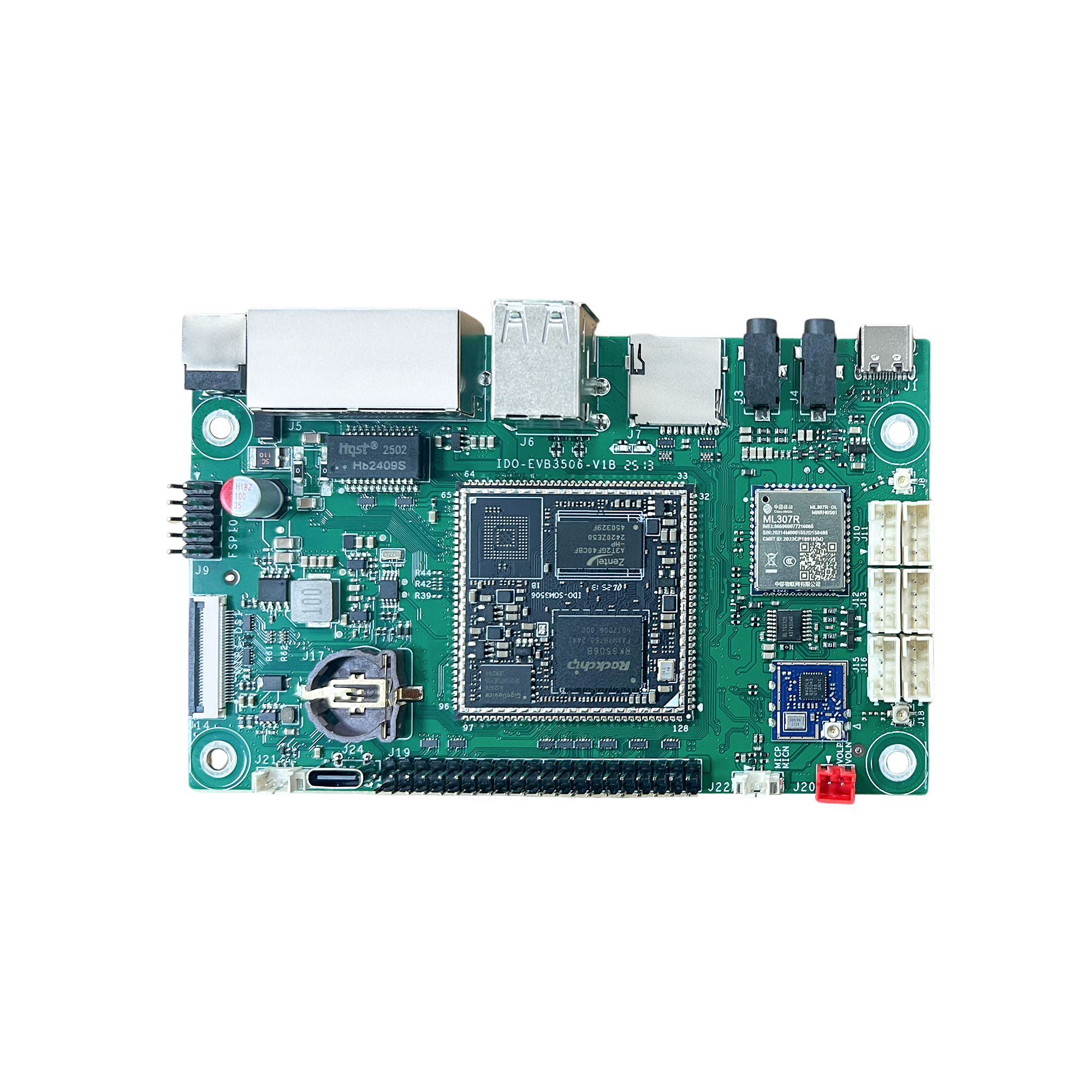
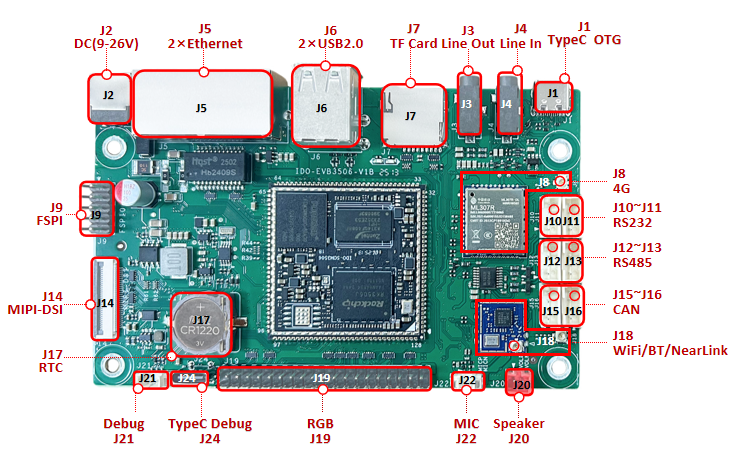
IDO-EVB3506-V1(FLASH版本)正面圖,如下圖所示:
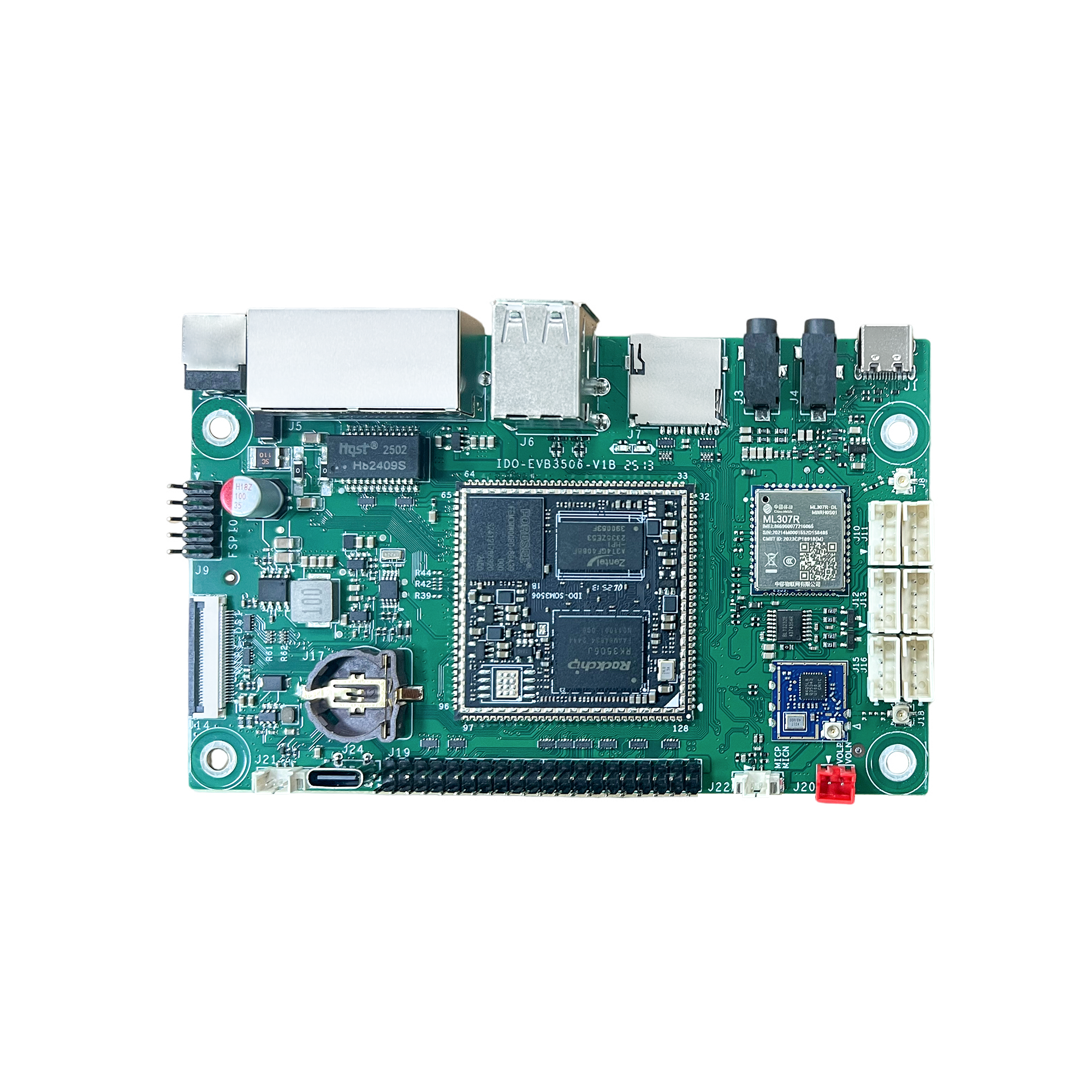
IDO-EVB3506-V1(eMMC版本)正面圖,如下圖所示:
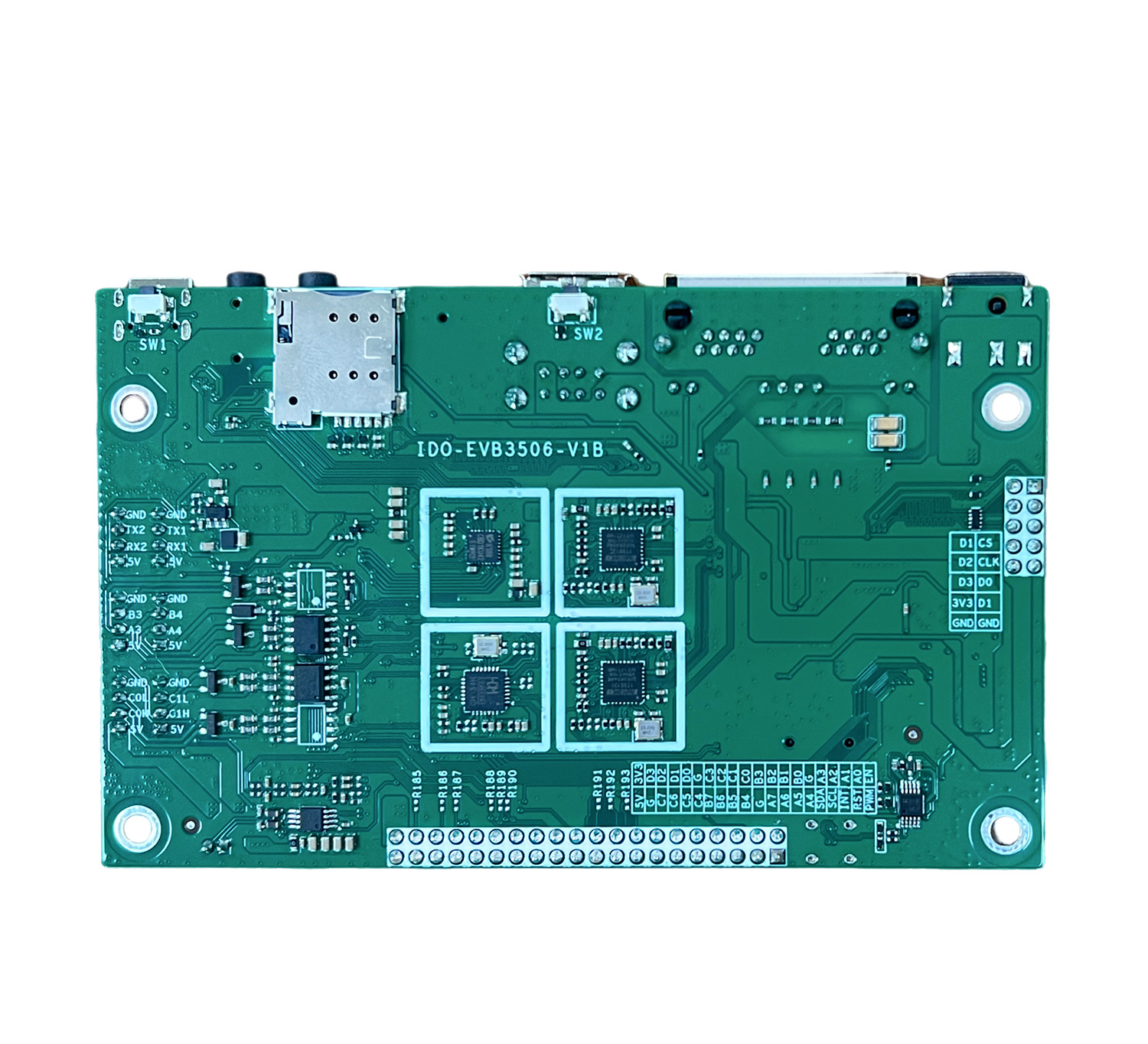
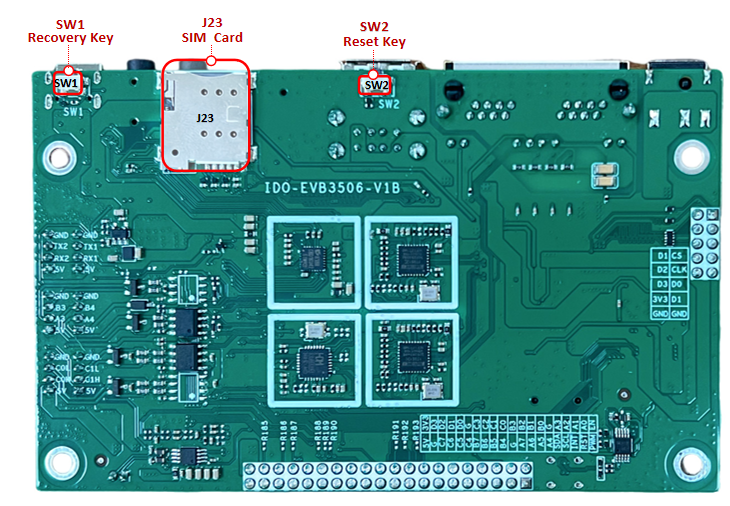
IDO-EVB3506-V1背面圖,如下圖所示:
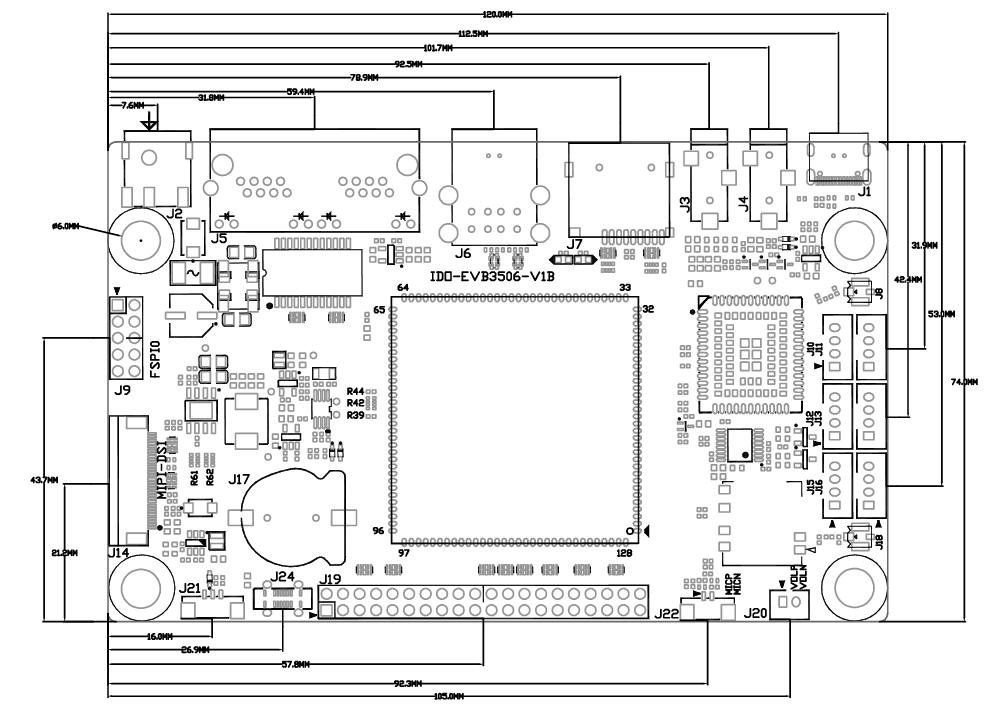
IDO-EVB3506-V1正面尺寸圖,如下圖所示:
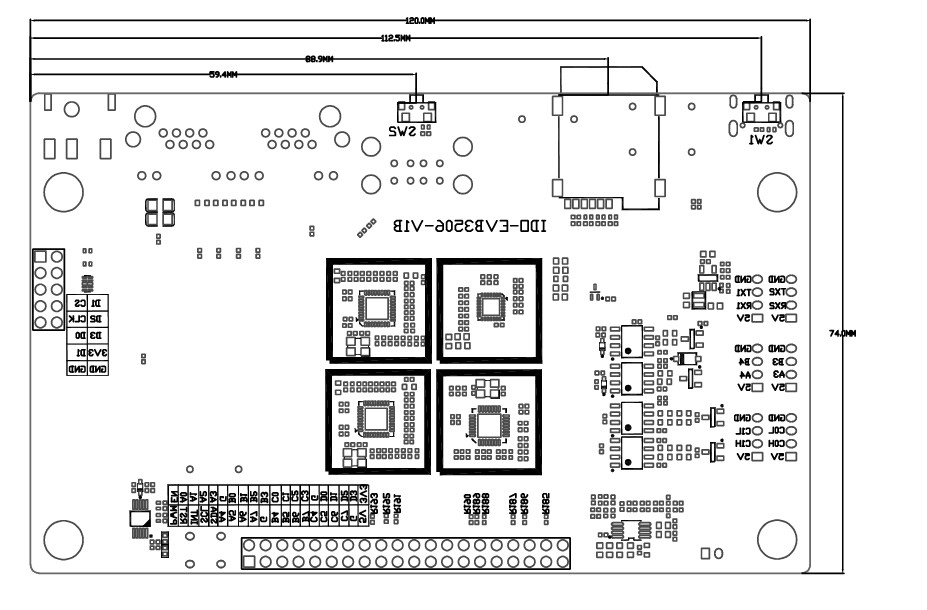
IDO-EVB3506-V1背面尺寸圖,如下圖所示:
2 技術參數
2.1 硬件參數
硬件參數,如下表所示:
| 基本參數 | |
| SOC | RockChip RK3506B/RK3506J |
| CPU | 三核 Cortex-A7+單核Cortex-M0, 主頻最高1.5GHz |
| GPU | 2D Graphic Engine |
| 內存 | 256MB/512MB/1GB DDR3/DDR3L 16bit |
| 存儲 |
以上配置二選一 1 × TF-Card Slot(eMMC版本不可用) |
| 硬件參數 | |
| 以太網 | 支持雙百兆以太網(100 Mbps) |
| 無線網絡 | 支持4G LTE Cat1移動通信 支持2.4GHz WLAN+BLE+SLE |
| 顯示接口 | 視頻輸出: 1 x RGB (1280×1280@60fps); 1 x MIPI_DSI_TX(2Lane Ouput/1.5Gbps per Lane,1280×1280@60fps); |
| 音頻接口 | 1 × SPEAKER,單聲道喇叭輸出 1 × LINEIN 1 × LINEOUT 1 × MIC |
| USB | 1 × USB2.0 OTG 2 × USB2.0 HOST |
| 擴展接口 | 1 × Debug UART TTL 1 × RS232(最大支持2路) 1 × RS485(最大支持2路) 1 × CAN(最大支持2路) 1 × I2C 1 × FSPI(NAND FLASH版本不可用) 34 × GPIO(最大) |
| 其他 | |
| 主板尺寸 | 120mm × 73.9mm |
2.2 工作環境
工作環境,如下表所示:
| 工作環境 | |
| 工作溫度 | -20~+80℃ |
| 工作濕度 | 0~90% RH 非冷凝 |
| 存儲溫度 | -40~+85℃ |
2.3 系統支持
系統支持,如下表所示:
| 序號 | 操作系統 | 支持 | 說明 |
| 1 | Buildroot | | / |
| 2 | Ubuntu | | / |
3 接口定義
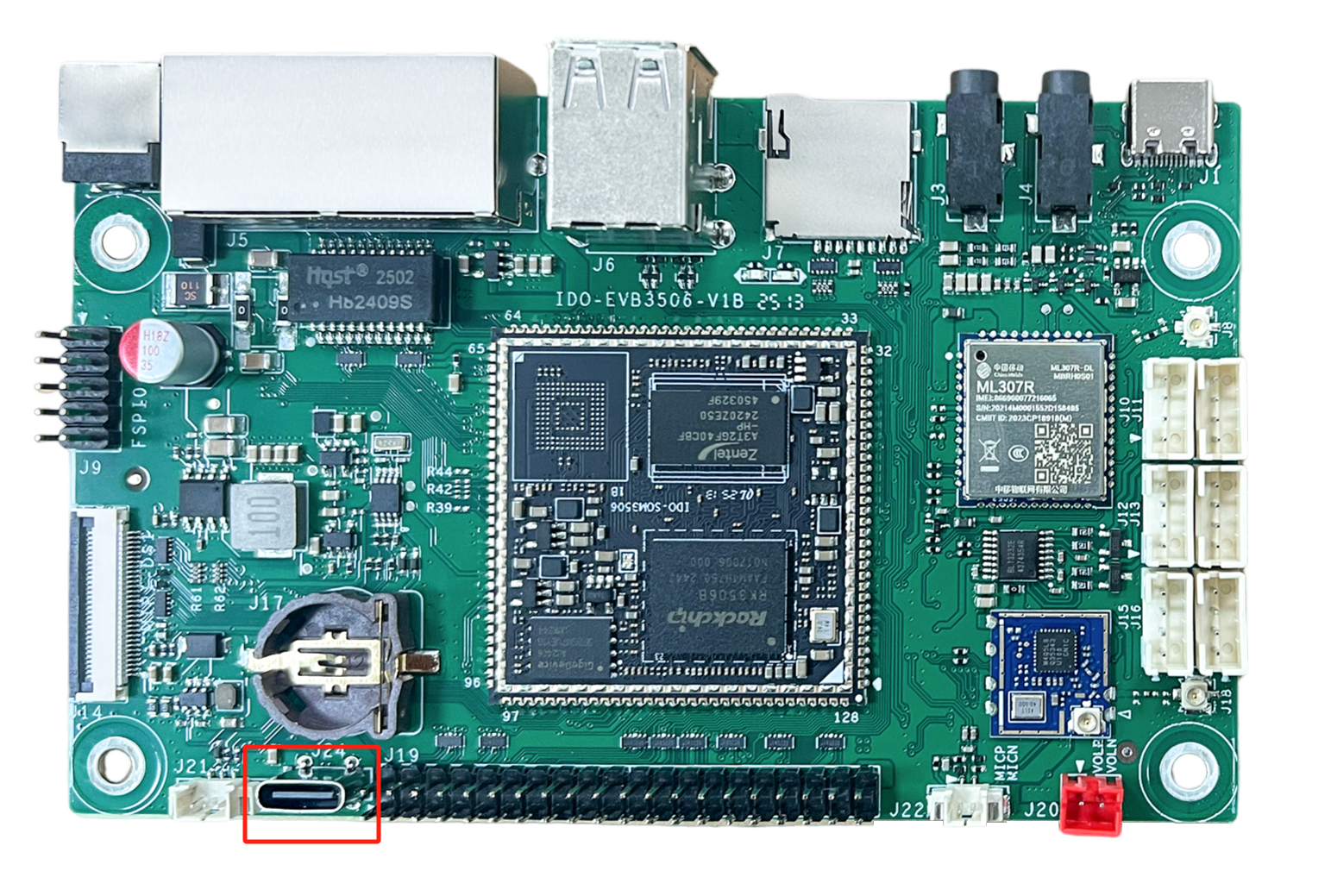
IDO-EVB3506-V1正面接口位號圖,如下圖所示:
IDO-EVB3506-V1背面接口位號圖,如下圖所示:
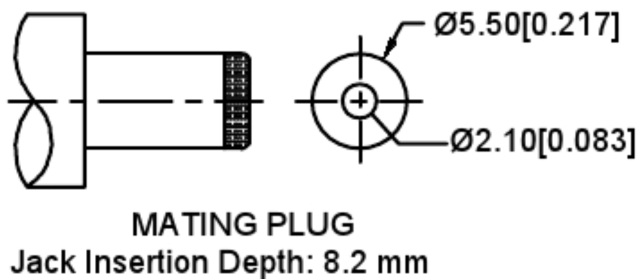
3.1 電源接口
主板額定電壓: 12V。
電流要求:不小于1A 。
注意:主板可適應的供電電壓范圍:DC9V-26V。
通過 J2 DC-042座 (內徑2mm,外徑6mm) 連接電源適配器,電源插頭參考圖片,如下圖所示:
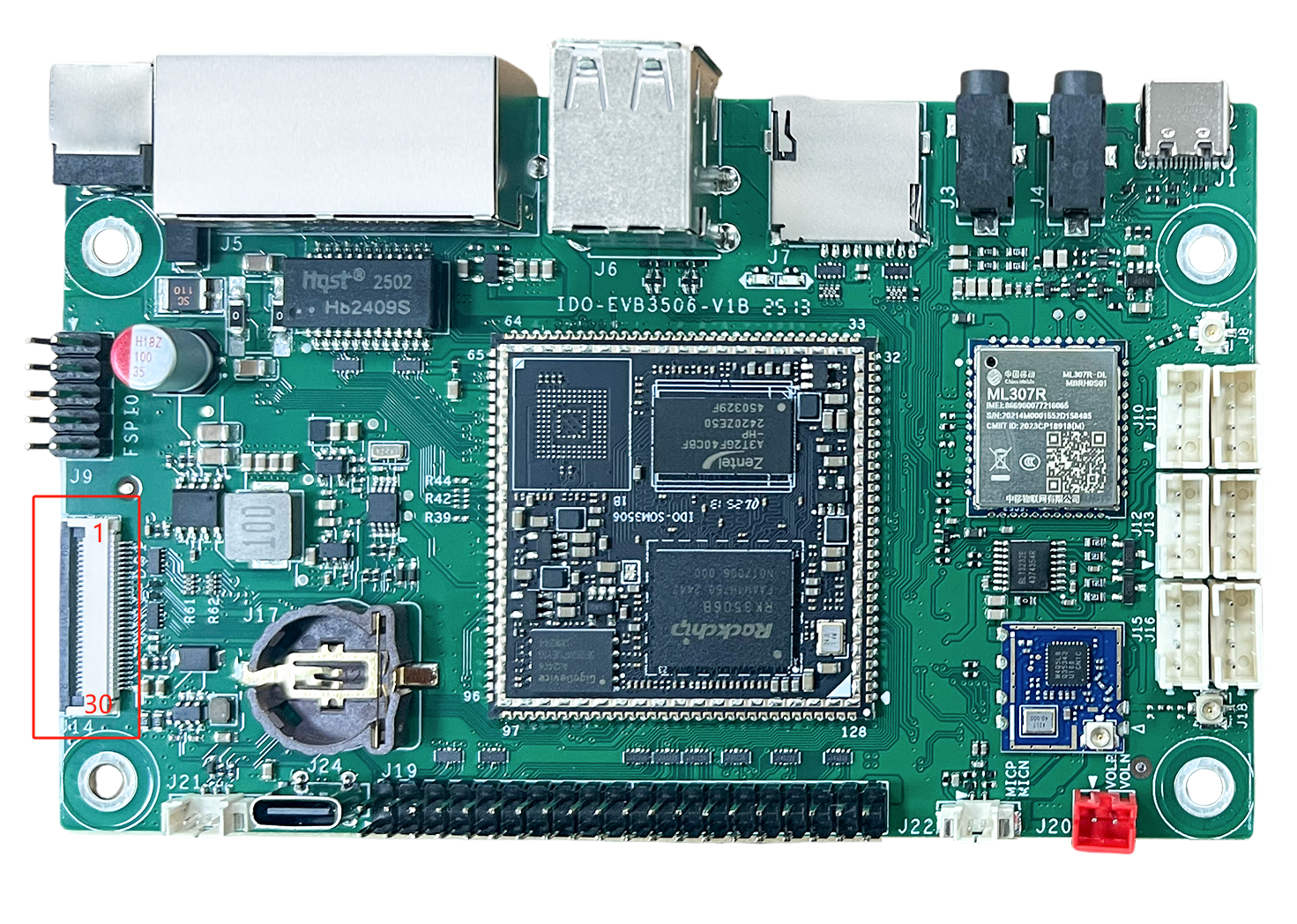
3.2 MIPI-DSI接口
開發板支持1路MIPI-DSI,2-Lane,支持1280x1280@60fp;
(J14) 30Pin FPC 0.5mm 下接,如下圖所示:
|
| |||
| 序號 | 定義 | 電平/V | 說明 |
| 1 | VCC_LEDK_TX | / | MIPI-DSI背光源負極 |
| 2 | VCC_LEDK_TX | / | |
| 3 | VCC_LEDA_TX | 30V | MIPI-DSI背光源正極 |
| 4 | GND | GND | 電源地 |
| 5 | MIPI_RST_L | / | MIPI_DSI 復位信號 |
| 6 | GND | / | 電源地 |
| 7 | VCC3V3 | GND | VCC_3.3V供電 |
| 8 | GND | / | MIPI_DSI_TX_D1信號對 |
| 9 | VCC3V3 | / | VCC_3.3V供電 |
| 10 | GND | GND | 電源地 |
| 11 | MIPI_DSI_D0P | / | MIPI_DSI_D0信號對 |
| 12 | MIPI_DSI_D0N | / | |
| 13 | GND | GND | 電源地 |
| 14 | MIPI_DSI_D1P | / | MIPI_DSI_D1信號對 |
| 15 | MIPI_DSI_D1N | / | |
| 16 | GND | GND | 電源地 |
| 17 | MIPI_DSI_CLKP | / | MIPI_DSI_TX_D3信號對 |
| 18 | MIPI_DSI_CLKN | / | |
| 19 | GND | GND | 電源地 |
| 20 | GND | GND | 電源地 |
| 21 | GND | GND | 電源地 |
| 22 | GND | GND | 電源地 |
| 23 | GND | GND | 電源地 |
| 24 | GND | GND | 電源地 |
| 25 | TP_INT | 3.3V | TP中斷信號 |
| 26 | TP_SDA | 3.3V | I2C總線信號 |
| 27 | TP_SCL | 3.3V | |
| 28 | TP_RST | 3.3V | TP復位信號 |
| 29 | VCC3V3 | 3.3V | 3.3V電源 |
| 30 | GND | GND | 電源地 |
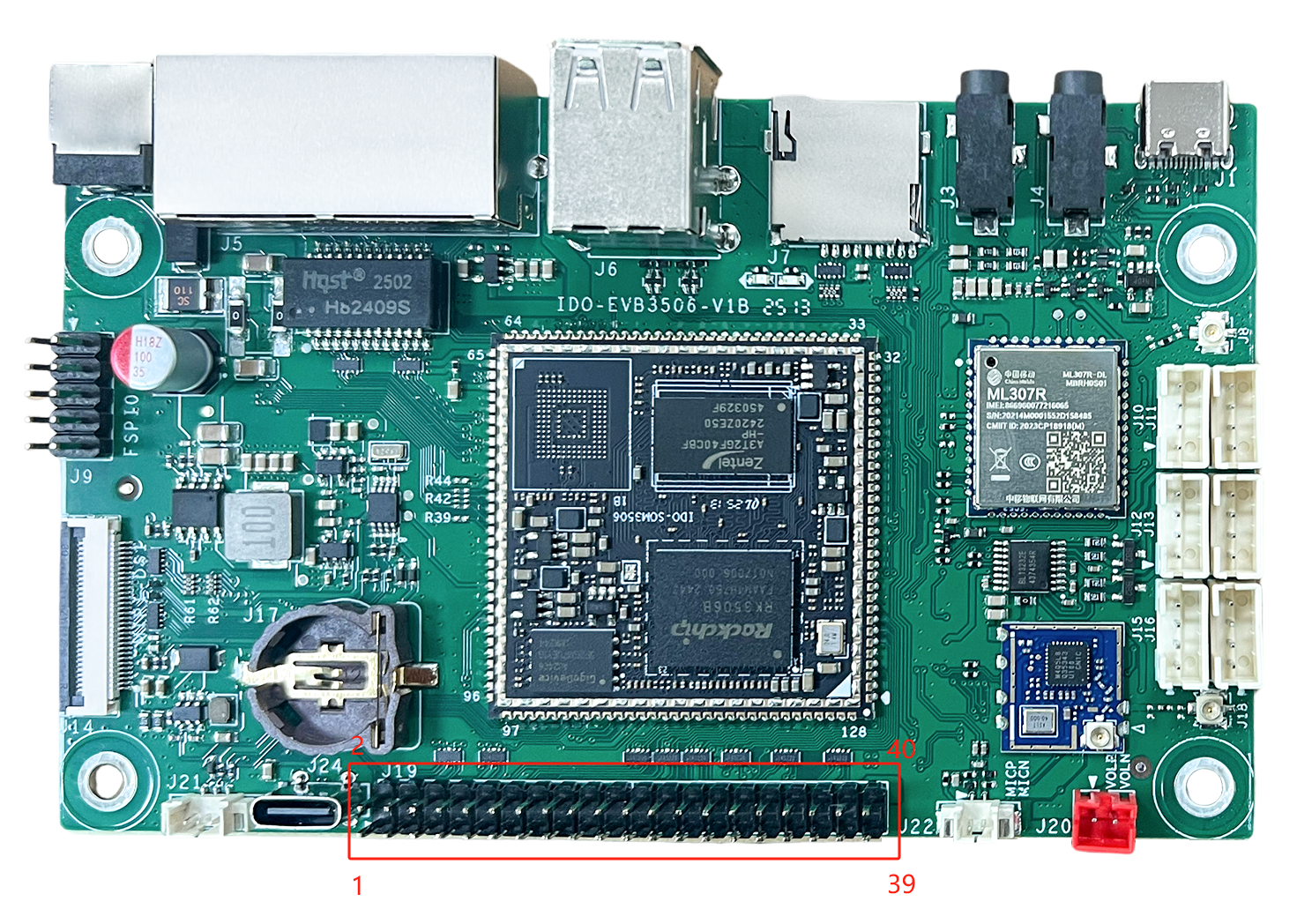
3.3 RGB接口
注意:主板預留1路RGB888顯示輸出接口,分辨率最大支持 1280×1280@60fps(和UART2、UART4以及其他GPIO復用,主板默認無RGB輸出) ;
(J19) 2X20P 2.54mm間距 雙排針 直針 黑色,如下圖所示:
|
| |||
| 序號 | 定義 | 電平/V | 說明 |
| 1 | RGB_PWM | / | |
| 2 | LCD_PWREN_H_ | / | |
| 3 | TP_RST0 | / | |
| 4 | VO_LCDC_DEN/GPIO1_A0 | / | |
| 5 | TP_INT0 | / | |
| 6 | VO_LCDC_VSYNC/GPIO1_A1 | / | |
| 7 | TP_SCL0 | / | |
| 8 | VO_LCDC_HSYNC/GPIO1_A2 | / | |
| 9 | TP_SDA0 | / | |
| 10 | VO_LCDC_CLK/GPIO1_A3 | / | |
| 11 | VO_LCDC_D23/GPIO1_A4 | / | |
| 12 | GND | GND | |
| 13 | VO_LCDC_D22/GPIO1_A5 | / | |
| 14 | VO_LCDC_D19/GPIO1_B0 | / | |
| 15 | VO_LCDC_D21/GPIO1_A6 | / | |
| 16 | VO_LCDC_D18/UART2_TX/GPIO1_B1 | / | |
| 17 | VO_LCDC_D20/GPIO1_A7 | / | |
| 18 | VO_LCDC_D17/CAN0_TX/GPIO1_B2 | / | |
| 19 | GND | GND | |
| 20 | VO_LCDC_D16/CAN0_RX/GPIO1_B3 | / | |
| 21 | VO_LCDC_D15/GPIO1_B4 | / | |
| 22 | VO_LCDC_D11/GPIO1_C0 | / | |
| 23 | VO_LCDC_D14/GPIO1_B5 | / | |
| 24 | VO_LCDC_D10/DSM_AUD_RN/GPIO1_C1 | / | |
| 25 | VO_LCDC_D13/GPIO1_B6 | / | |
| 26 | VO_LCDC_D9/DSM_AUD_RP/GPIO1_C2 | / | |
| 27 | VO_LCDC_D12/GPIO1_B7 | / | |
| 28 | VO_LCDC_D8/UART2_RX/GPIO1_C3 | / | |
| 29 | VO_LCDC_D7/GPIO1_C4 | / | |
| 30 | GND | GND | |
| 31 | VO_LCDC_D6/GPIO1_C5 | / | |
| 32 | VO_LCDC_D3/GPIO1_D0 | / | |
| 33 | VO_LCDC_D5/GPIO1_C6 | / | |
| 34 | VO_LCDC_D2/UART4_RTSN/GPIO1_D1 | / | |
| 35 | VO_LCDC_D4/GPIO1_C7 | / | |
| 36 | VO_LCDC_D1/UART4_RX/GPIO1_D2 | / | |
| 37 | GND | GND | |
| 38 | VO_LCDC_D0/UART4_TX/GPIO1_D3 | / | |
| 39 | VCC5V0 | 5V | |
| 40 | VCC3V3 | 3V3 | |
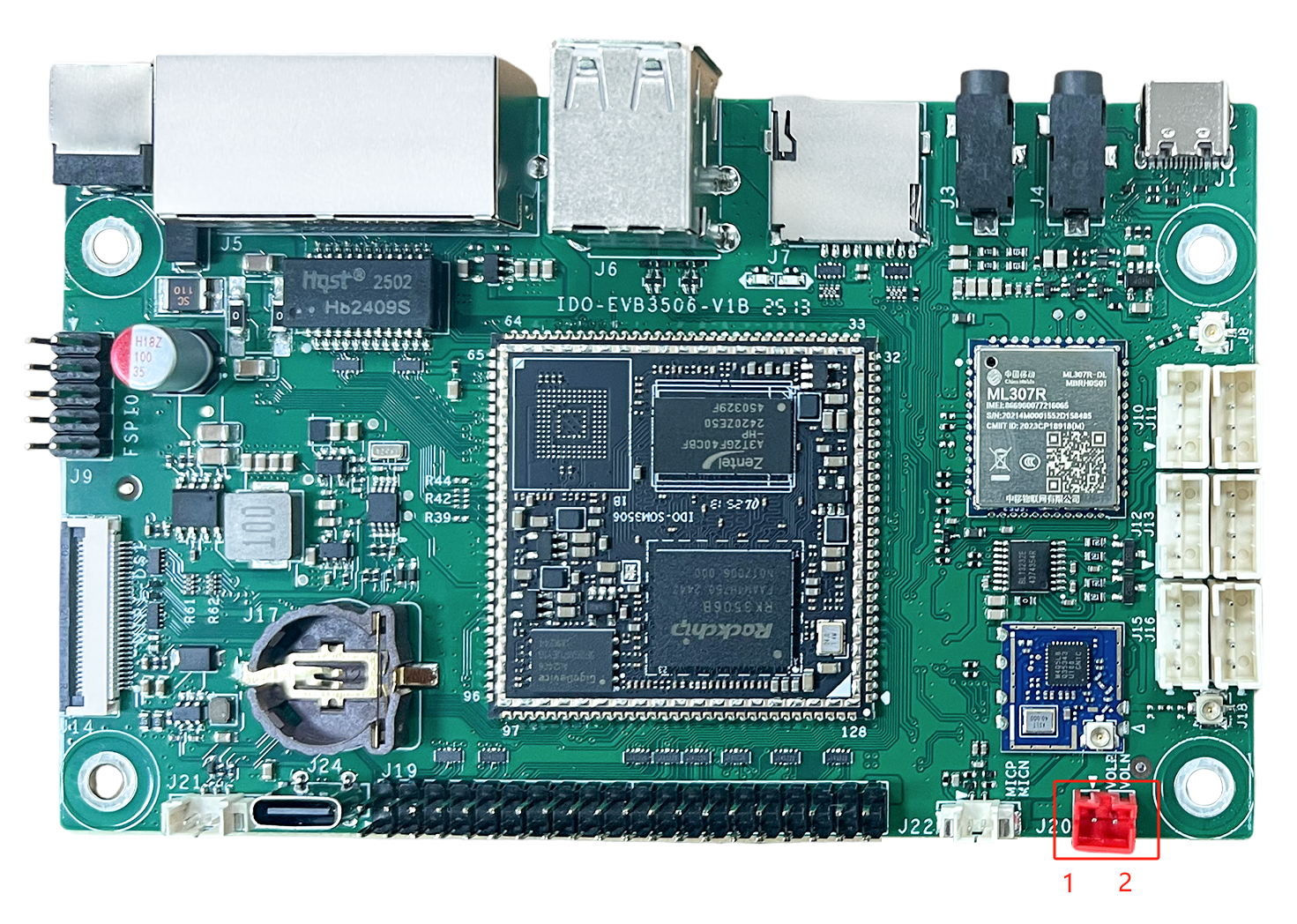
3.4 Speaker接口
(J20) PH2.0-2P 米白色 直針,單聲道揚聲器接口,支持4Ω 3W輸出,如下圖所示:
| 序號 | 定義 | 電平/V | 說明 |
| 1 | VOLP | / | 喇叭驅動輸出差分信號P |
| 2 | VOLN | / | 喇叭驅動輸出差分信號N |
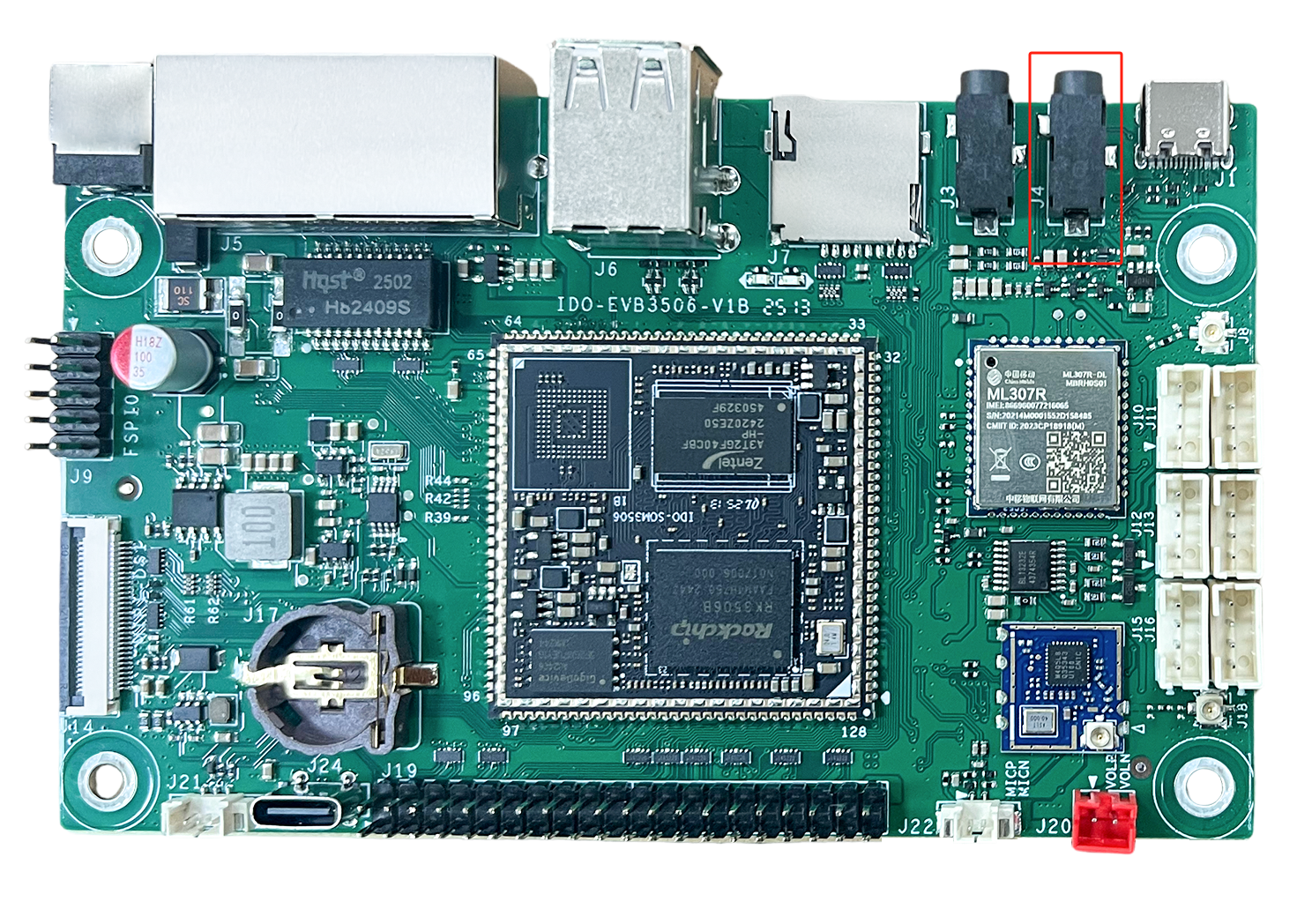
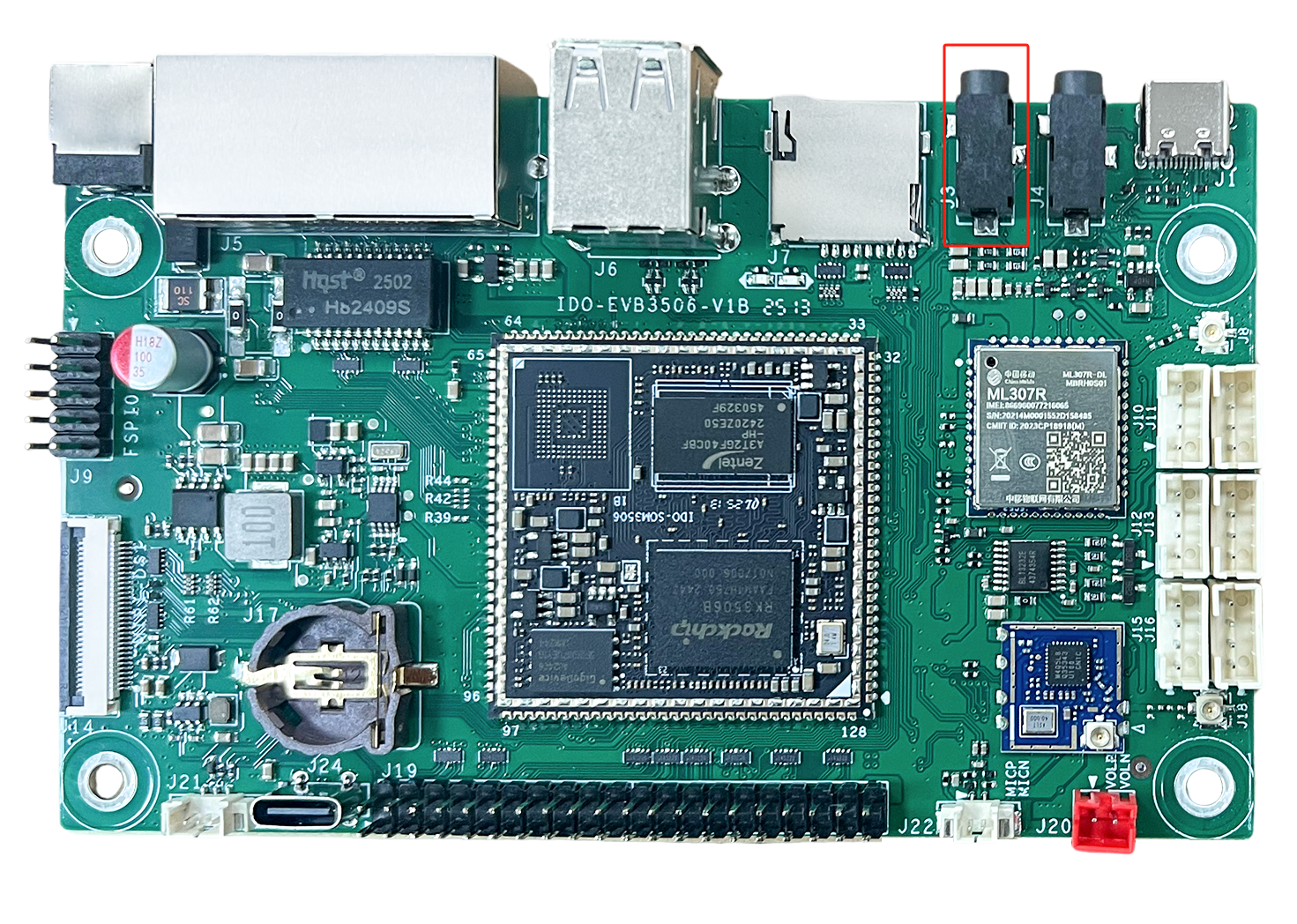
3.5 LINEIN接口
(J4) 支持1路3.5mm三節耳機座,用于輸入來自其他音頻設備的音頻信號,如下圖所示:
3.6 LINEOUT接口
(J3) 支持1路3.5mm三節耳機座,用于輸出音頻信號到其他的音頻接收設備,如下圖所示:
3.7 MIC接口
(J22) MX1.25-2P 立貼 米白色 單麥克風錄音接口,支持駐極體麥克風輸入,如下圖所示:
|
| |||
| 序號 | 定義 | 電平/V | 說明 |
| 1 | ACODEC_ADC_INP | / | 麥克風音頻輸入差分信號N |
| 2 | ACODEC_ADC_INN | / | 麥克風音頻輸入差分信號P |
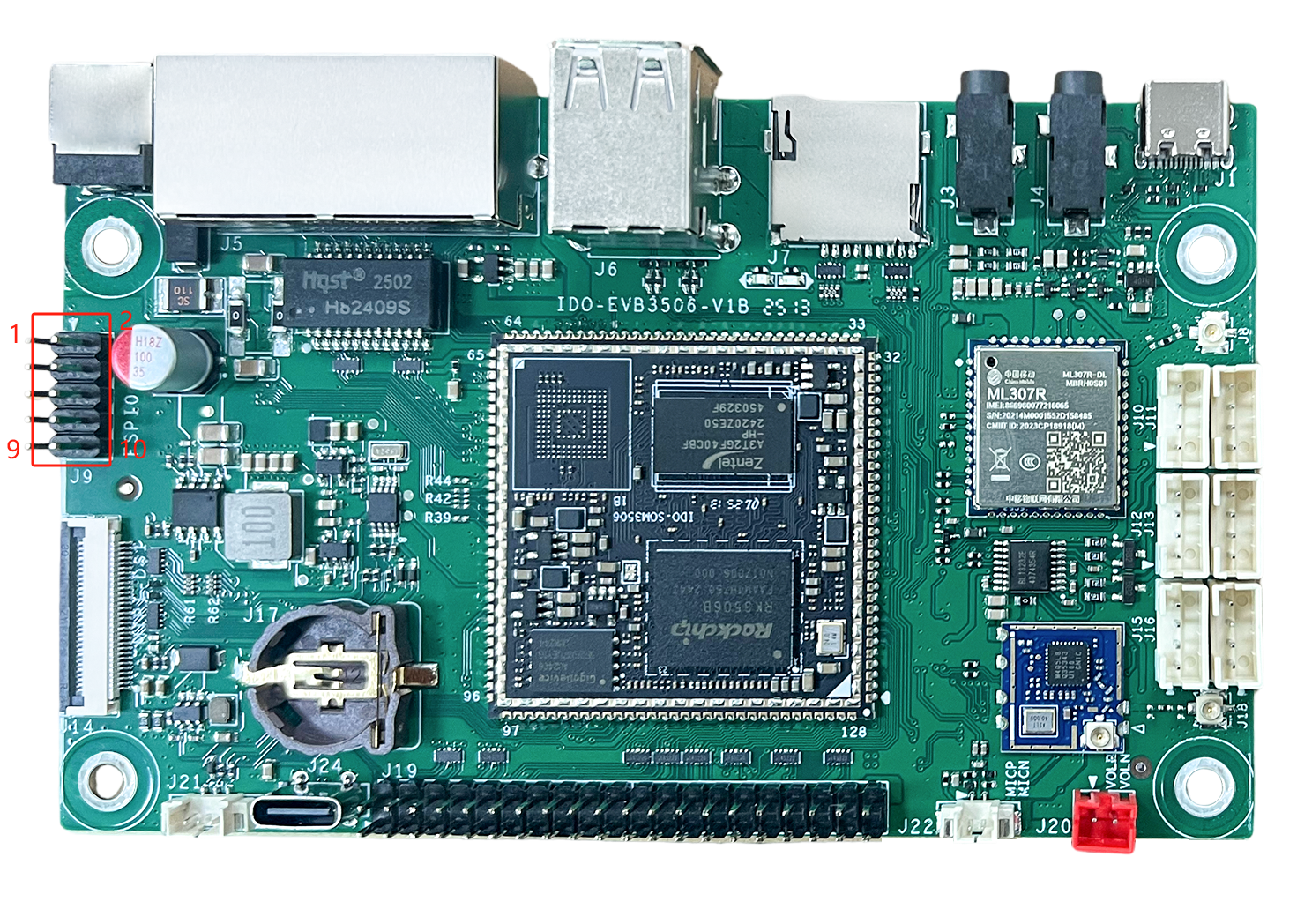
3.8 FSPI接口
注意:支持1路FSPI接口(和NAND FLASH復用,NAND FLASH版本默認無FSPI接口功能);
(J9) 2X5P 2.54mm間距 雙排針 直針 黑色,如下圖所示:
|
| |||
| 序號 | 定義 | 電平/V | 說明 |
| 1 | FSPI_CSN | 3.3V | FSPI信號組 |
| 2 | FSPI_D1 | 3.3V | |
| 3 | FSPI_CLK | 3.3V | |
| 4 | FSPI_D2 | 3.3V | |
| 5 | FSPI_D0 | 3.3V | |
| 6 | FSPI_D3 | 3.3V | |
| 7 | VCC5V0 | 5V | 3.3V電源輸出 |
| 8 | VCC3V3 | 3.3V | 5V電源輸出 |
| 9 | GND | GND | 電源地 |
| 10 | GND | GND | 電源地 |
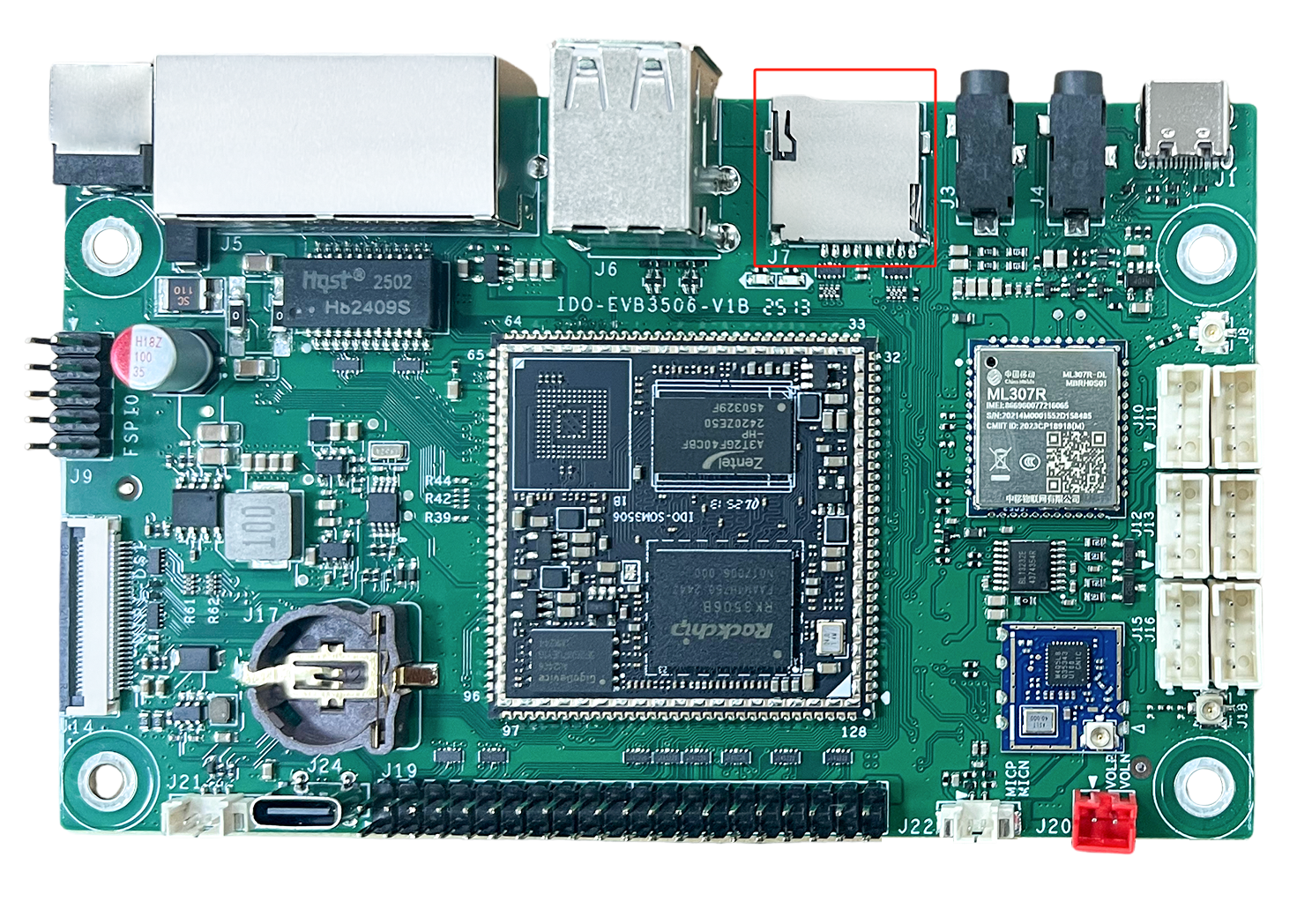
3.9 TF卡接口
注意:支持1路高速SD卡擴展(和eMMC復用,eMMC版本默認無SD卡功能);
(J7) TF卡座支持高速SD卡,如下圖所示:
3.10 USB接口
開發板支持3個USB2.0接口,1個TypeC接口,2個USB2.0 TYPEA接口,USB對外總供電應小于2A。
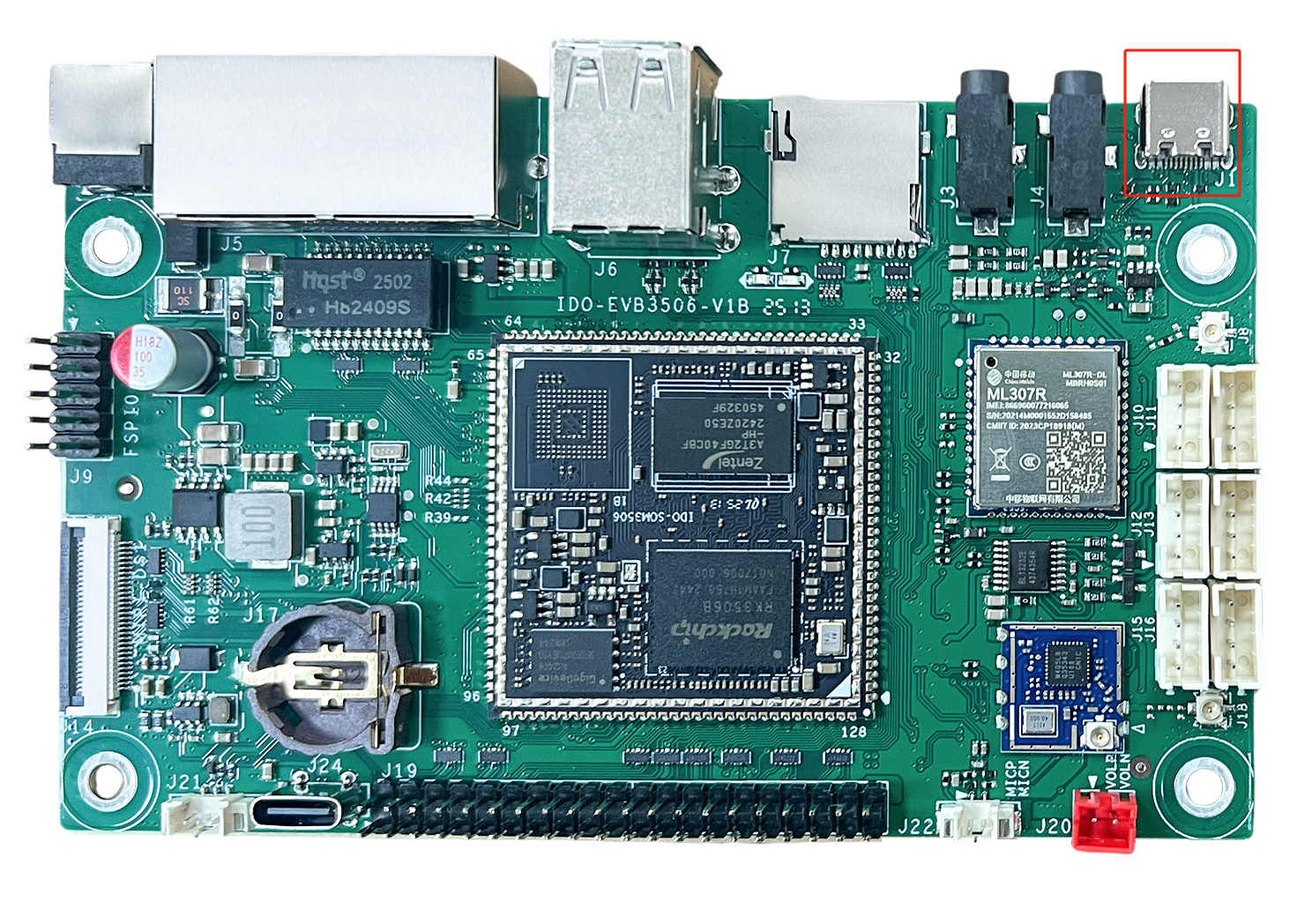
3.10.1 Type-C接口
(J1) 主板支持1個Type-C接口(USB2.0 OTG),可用來下載固件,如下圖所示:
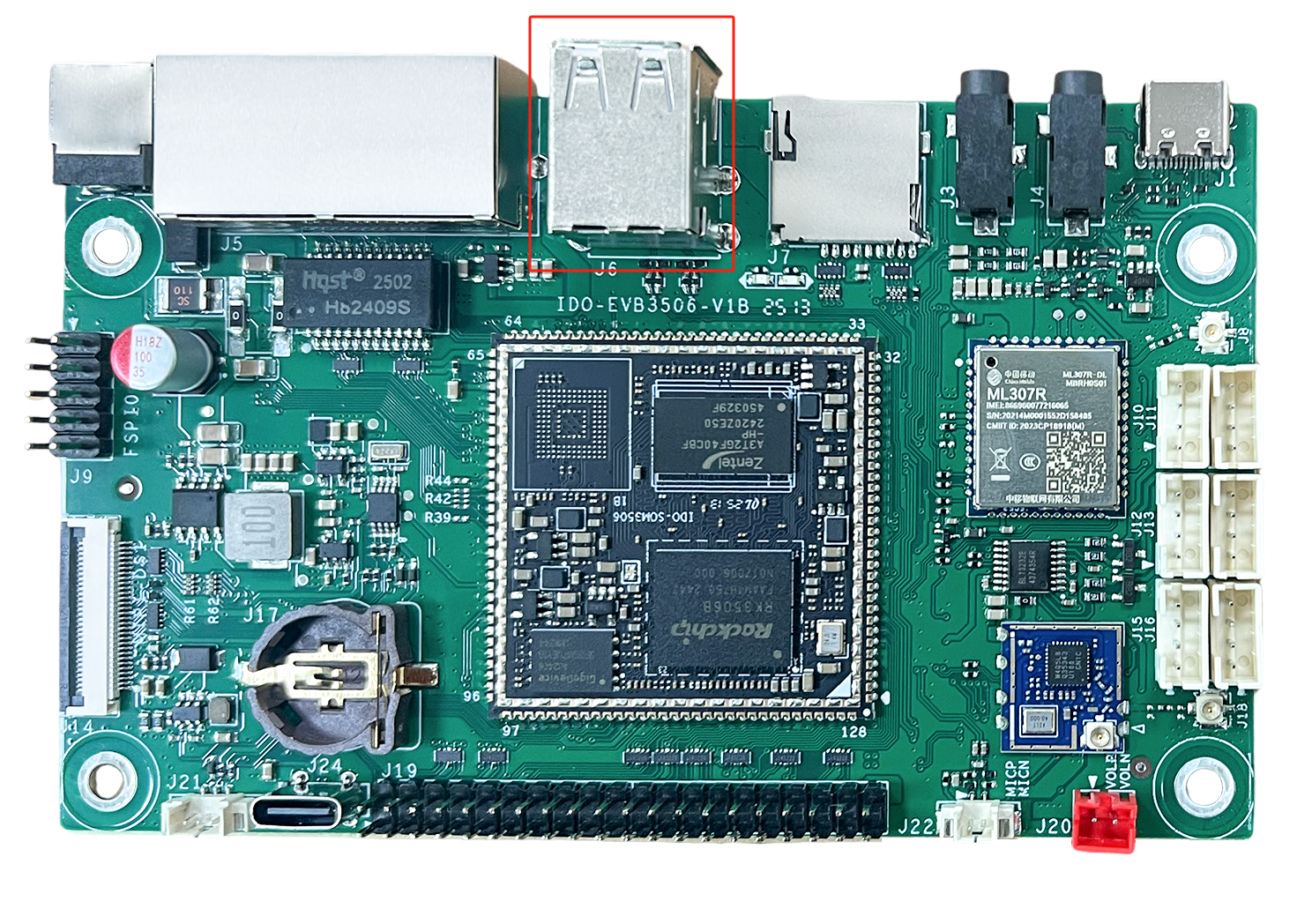
3.10.2 Type-A接口
(J6)主板默認支持2個USB2.0接口,USB接口默認提供5V@1A的驅動能力。
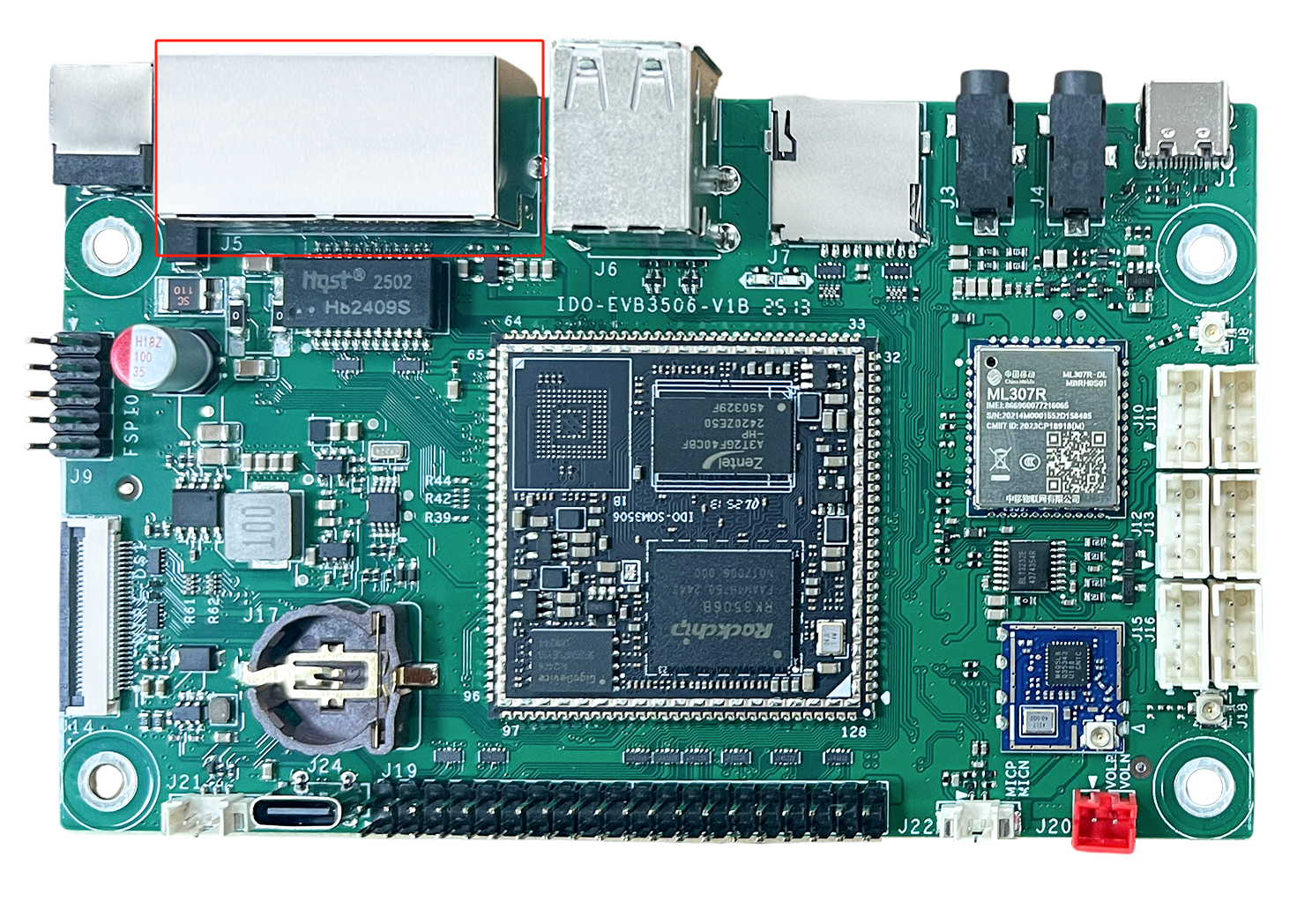
3.11 Ethernet接口
(J5)適應雙百兆網口,支持WAN口+LAN口 雙IP,如下圖所示:
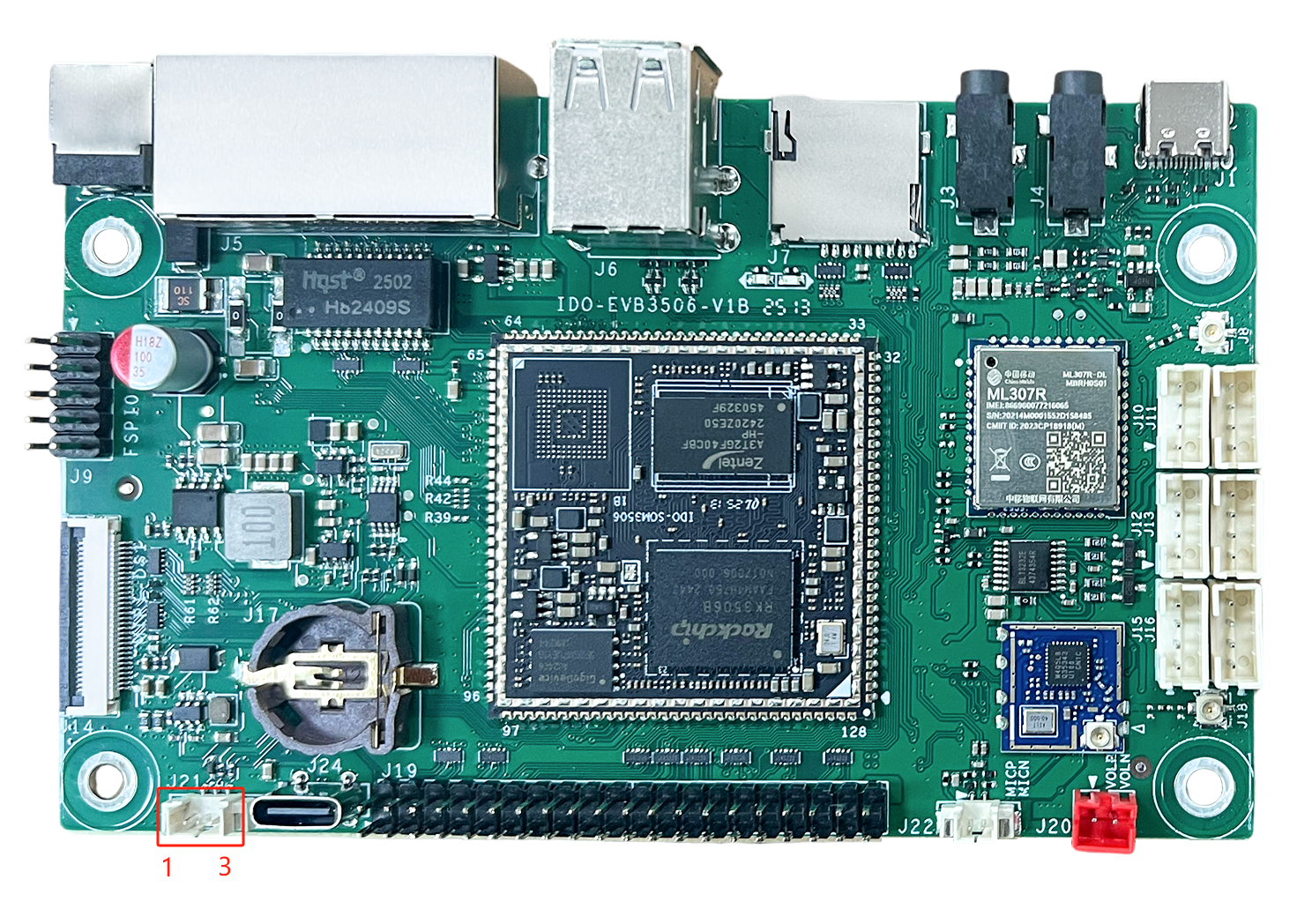
3.12 調試串口
(J21) 1.25T 3P 立貼 米白色,如下圖所示:
|
| |||
| 序號 | 定義 | 電平/V | 說明 |
| 1 | UART0_RX_Debug | 3.3V TTL | 默認1.5Mbps波特率 |
| 2 | UART0_TX_Debug | 3.3V TTL | |
| 3 | GND | GND | 電源地 |
(J24) TypeC 立貼調試口,如下圖所示:
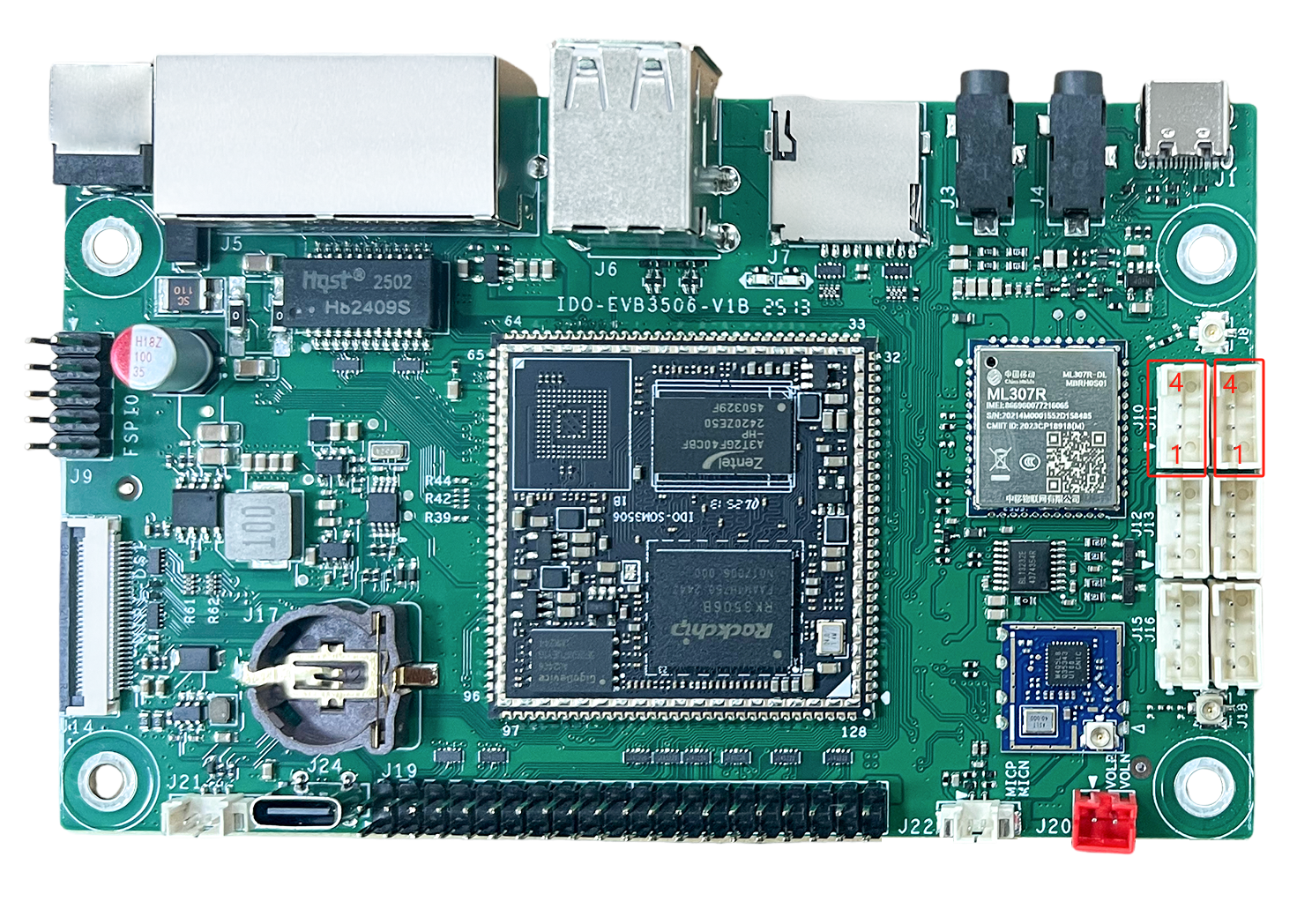
3.13 串口通信
IDO-EVB3506-V1主板一共擴展4路通信串口(不含調試UART),4路串口通過4個PH2.0-4P米白色座子接出(2路RS232和2路RS485),其中 UART2和 UART4與RGB屏幕復用, 接RGB屏幕時J11和J13不可用。
3.13.1 RS232
(J10、J11) PH2.0-4P 米白色 直針,如下圖所示:
|
| ||||
| 連接器 | 序號 | 定義 | 電平/V | 說明 |
| J10 | 1 | VCC | 5V | 5V供電輸出 |
| 2 | RS232_RX1 | / | 設備節點(/dev/ttyS1) | |
| 3 | RS232_TX1 | / | ||
| 4 | GND | GND | 電源地 | |
| J11(默認不使用) | 1 | VCC | 5V | 5V供電輸出 |
| 2 | RS232_RX2 | / | 設備節點(/dev/ttyS2) | |
| 3 | RS232_TX2 | / | ||
| 4 | GND | GND | 電源地 | |
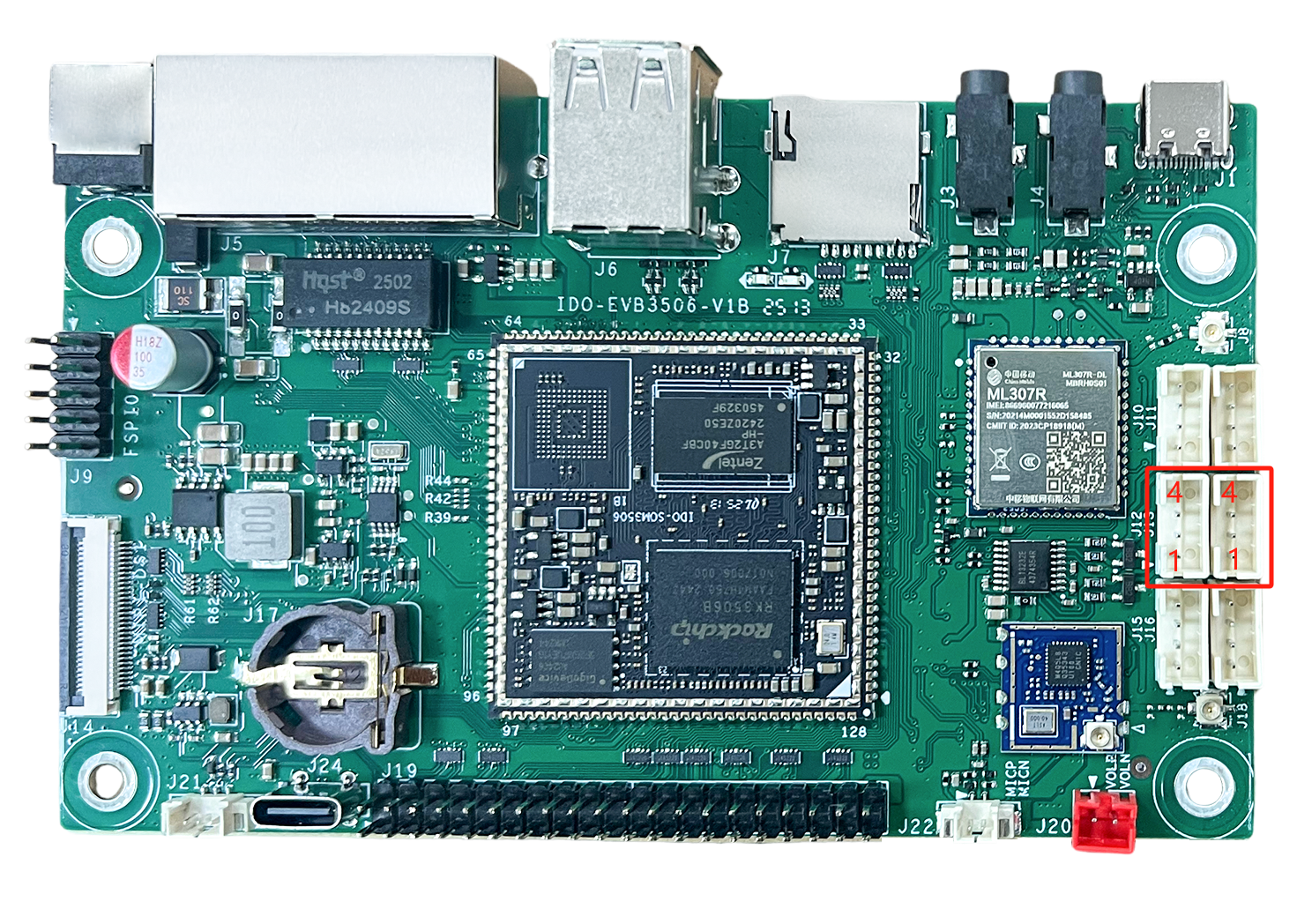
3.13.2 RS485
(J12、J13) PH2.0-4P 米白色 直針,如下圖所示:
|
| ||||
| 連接器 | 序號 | 定義 | 電平/V | 說明 |
| J12 | 1 | VCC | 5V | 5V供電輸出 |
| 2 | RS485_A4 | / | 設備節點(/dev/ttyS4) | |
| 3 | RS485_B4 | / | ||
| 4 | GND | GND | 電源地 | |
| J13(默認不使用) | 1 | VCC | 5V | 5V供電輸出 |
| 2 | RS485_A3 | / | 設備節點(/dev/ttyS3) | |
| 3 | RS485_B3 | / | ||
| 4 | GND | GND | 電源地 | |
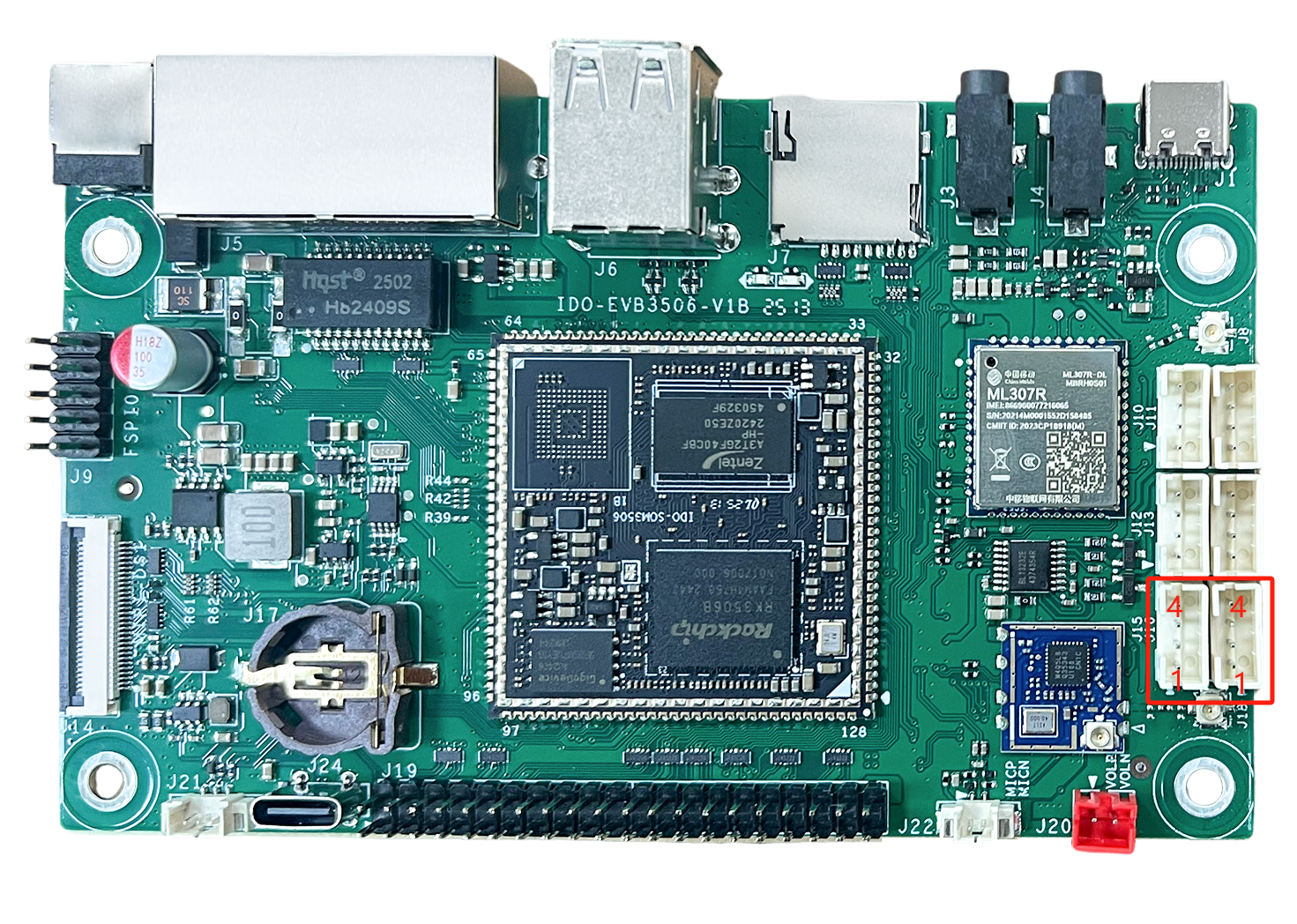
3.14 CAN接口
IDO-EVB3506-V1主板一共擴展2路CAN接口,2路CAN接口通過2個PH2.0-4P米白色座子接出,其中 CAN0與RGB屏幕復用, 接RGB屏幕時CAN0不可用。
(J15、J16) PH2.0-4P 米白色 直針,如下圖所示:
|
| ||||
| 序號 | 定義 | 電平/V | 說明 | |
| J15 | 5 | VCC | 5V | 5V供電輸出 |
| 6 | CAN1_H | / | CAN信號 | |
| 7 | CAN1_L | / | ||
| 8 | GND | GND | 電源地 | |
| J16(默認不使用) | 1 | VCC | 5V | 5V供電輸出 |
| 2 | CAN0_H | / | CAN信號 | |
| 3 | CAN0_L | / | ||
| 4 | GND | GND | 電源地 | |
3.15 WLAN+BLE+SLE
(J18) 默認板載星閃模組,支持2.4GHz WLAN+BLE+SLE,外置1個IPEX一代天線座,如下圖所示:
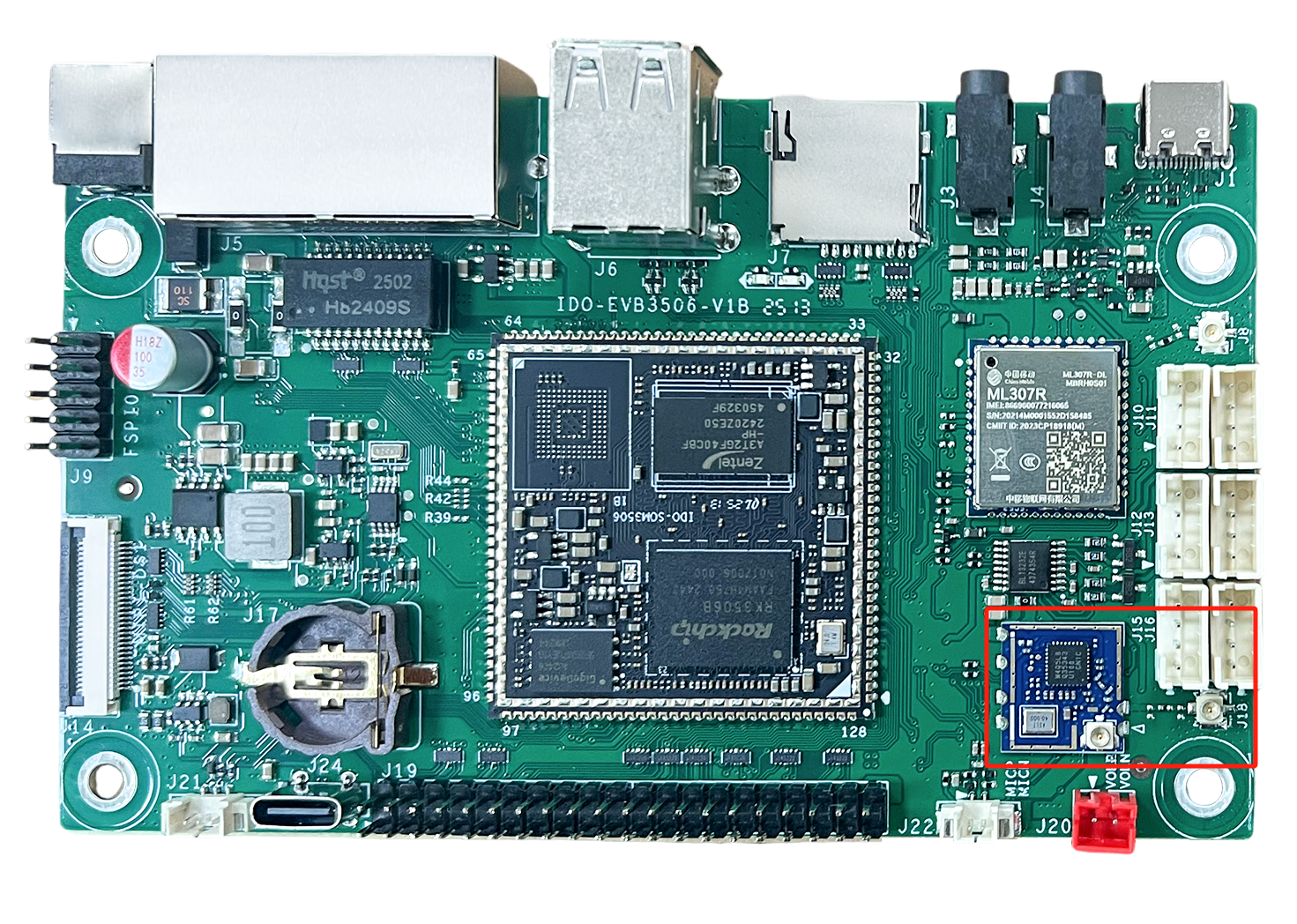
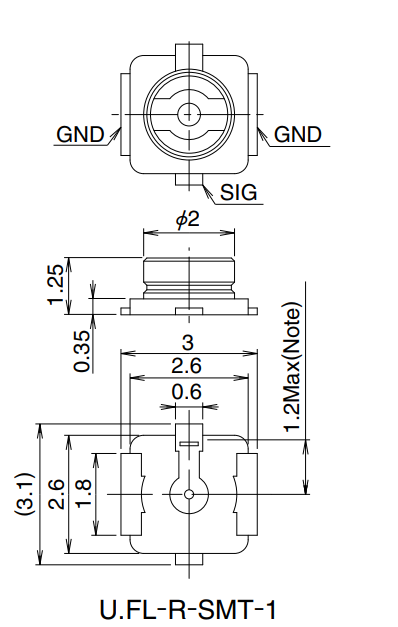
IDO-EVB3506-V1 IPEX天線座一代示意圖,如下圖所示:
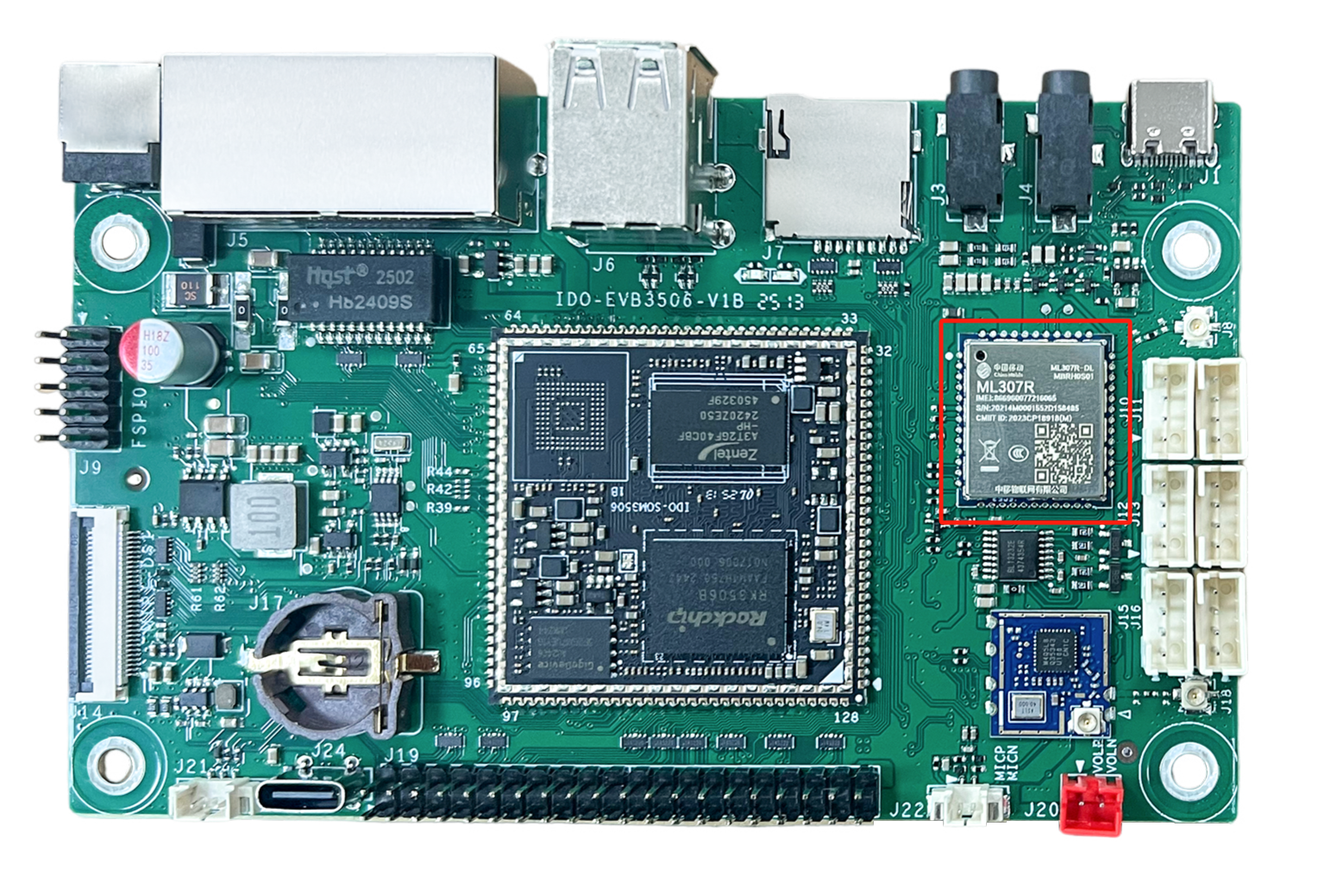
3.16 4G LTE Cat1
開發板板載中移4G LTE Cat1模組(ML307R-DC),上行速率最大支持5Mbps,下行速率最大支持10Mbps,如下圖所示:
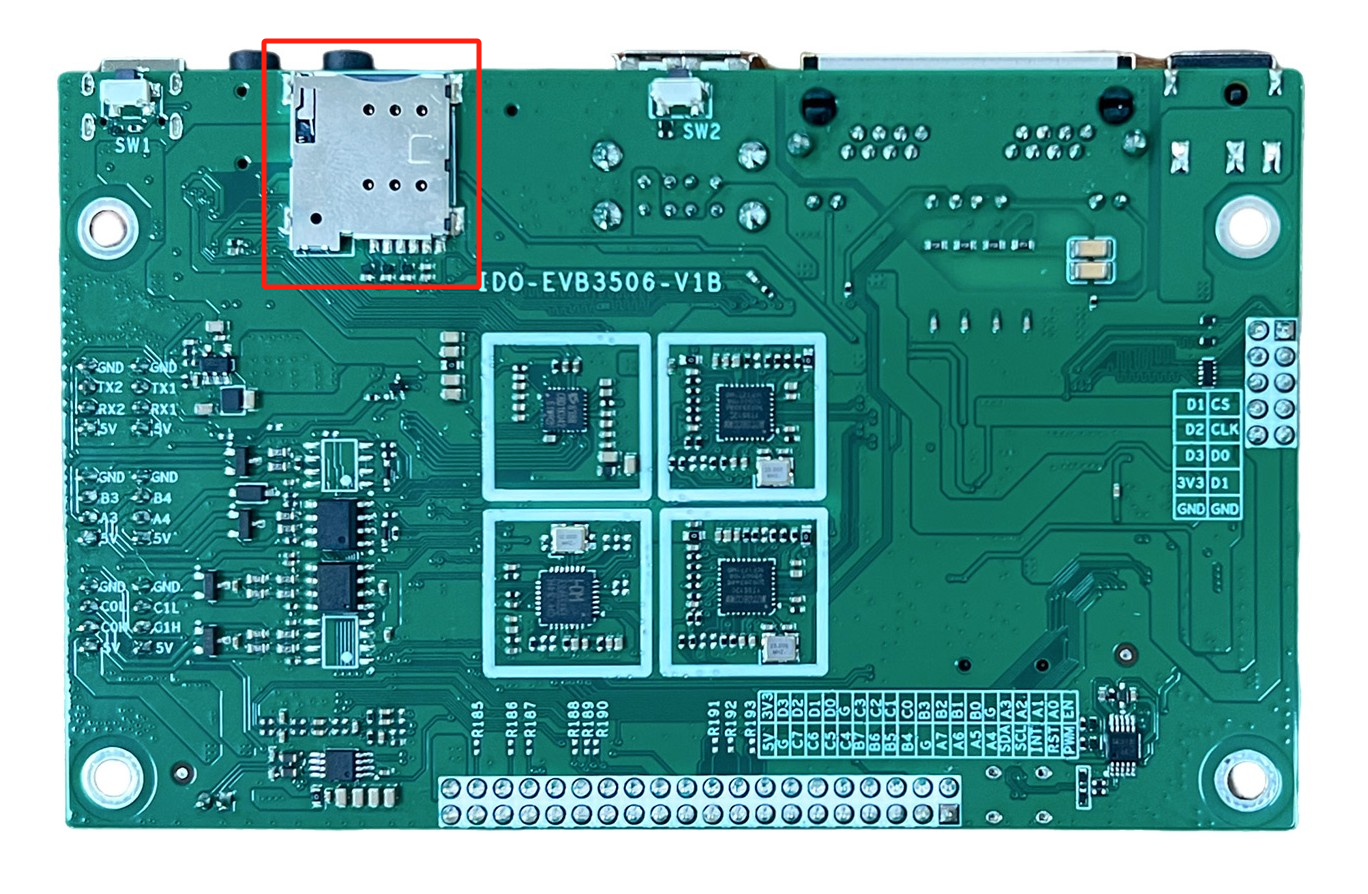
3.17 SIM卡座
(J23) SIM卡座位于主板背面,將標準尺寸SIM卡放入卡槽,如下表所示:
|
| |||
| 序號 | 名稱 | 圖片 | |
| 1 | NANO SIM卡 |
| |

3.18 RTC電池
(J17) 主板留有一個CR1220紐扣電池給RTC供電,保證主板在斷電情況下,時間保持正常運作,如下圖所示:
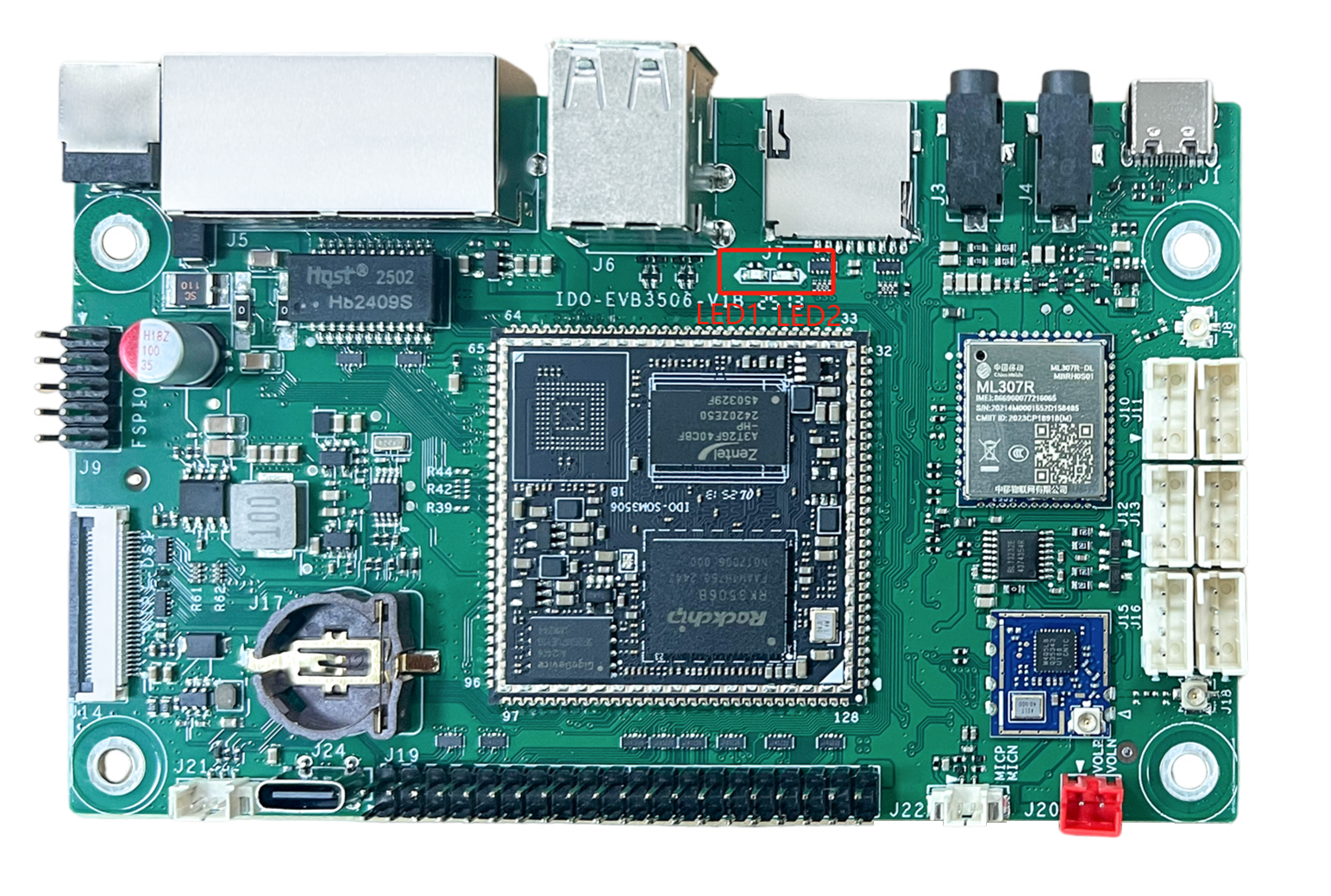
3.19 LED指示燈
LED指示燈如下圖所示:
|
| |||
| 序號 | 定義 | 電平/V | 說明 |
| 藍燈(LED1) | POWER_LED | 3.3V | 上電常亮指示燈 |
| 藍燈(LED2) | 4G_LED | 3.3V | 4G模塊的工作指示燈 |
3.20 按鍵
主板提供了2種按鍵(Recovery按鍵、Reset按鍵),方便開發調試使用。
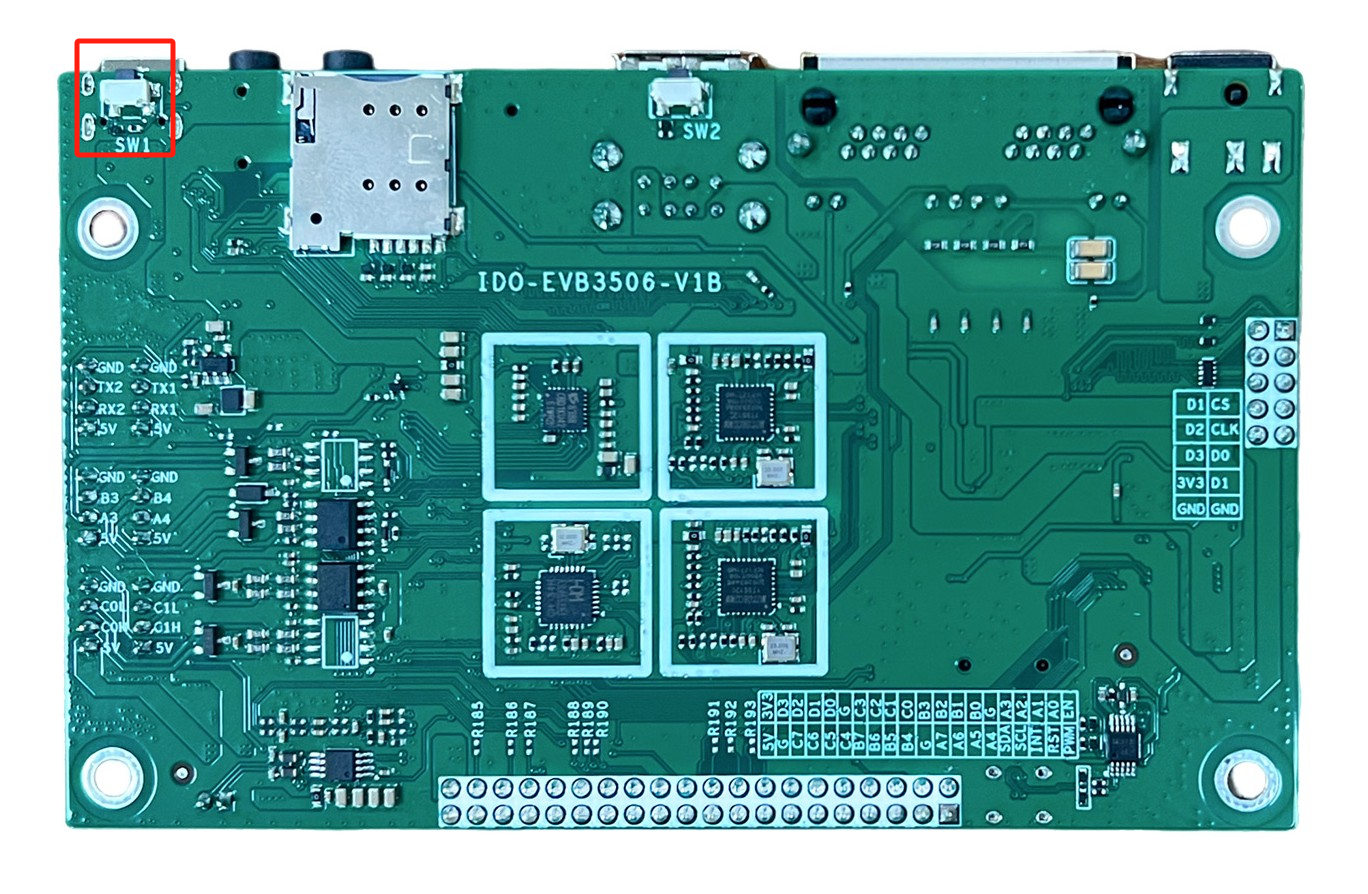
3.20.1 Recovery按鍵
(SW1) Recovery按鍵默認為高電平(1.8V),
關機狀態下:在沒有按鍵動作且系統已經燒錄固件的前提下,上電直接進入系統;若系統啟動時 Recovery 按鍵處于按下狀態,且電腦通過USB線連接主板TypeC接口,則RK3506進入 Loader 燒寫模式,當PC 識別到USB 設備時,松開按鍵恢復為高電平(1.8V),即可進行固件燒寫,系統開機后此按鍵為音量+鍵。
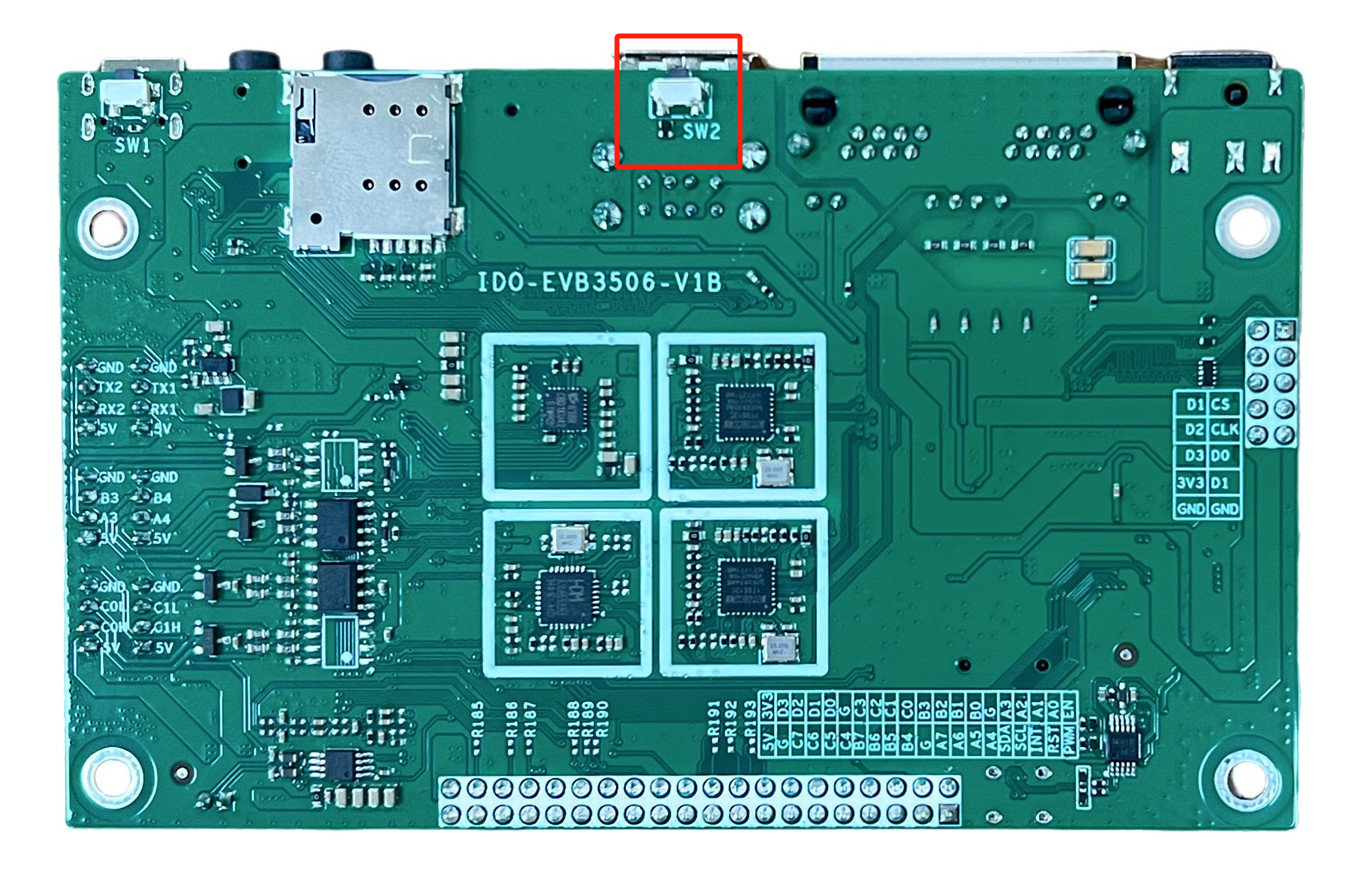
3.20.2 Reset按鍵
(SW2) 開機狀態下,按下Reset按鍵,系統復位。如下圖所示:
4 電氣性能
4.1 標準電源
標準電源性能,如下圖所示:
| 屬性 | 最小 | 典型 | 最大 | |
| 標準電源 | 電壓 | 9V | 12V | 26V |
| 紋波 | / | / | 100mV | |
| 電流 | 0.5A | / | / | |
4.2 裸板工作電流
裸板工作電流:不接任何外設下的工作電流,如下表所示:
| 屬性 | 最小 | 典型 | 最大 | |
| 標準電源 (12V適配器) | 靜態桌面工作電流 | / | 70mA | 80mA |
| 關機電流 | / | |||
| CPU負載工作電流 | / | |||
4.3 USB供電
USB供電,如下表所示:
| 屬性 | 電壓 | 典型電流 | 最大電流 | |
| 標準電源 | TYPEC2.0 OTG | / | / | 1000mA |
| USB2.0 HOST | / | / | 1000mA | |
注意:USB 外設總電流建議不超過 2000mA ,否則會導致機器無法正常運轉。
4.4 MIPI屏工作電流
MIPI屏工作電流,如下表所示:
| 屬性 | 最小 | 典型 | 最大 | |
| MIPI屏工作電流 | 3.3V工作電流 | / | 400mA | 800mA |
| 5V工作電流 | / | / | / | |
| 12V工作電流 | / | / | / | |









,HDMI)









)