在上一篇文章中,我們探討了混合精度訓練與梯度縮放技術。本文將深入介紹分布式訓練的三種主流方法:Data Parallel (DP)、Distributed Data Parallel (DDP) 和 DeepSpeed,幫助您掌握大規模模型訓練的關鍵技術。我們將使用PyTorch在CIFAR-10分類任務上實現這三種方法,并進行性能對比。
一、分布式訓練基礎
1. 三種分布式方法對比
| 特性 | DataParallel (DP) | DistributedDataParallel (DDP) | DeepSpeed |
|---|---|---|---|
| 實現難度 | 簡單 | 中等 | 復雜 |
| 多機支持 | 不支持 | 支持 | 支持 |
| 通信效率 | 低效(單進程) | 高效(NCCL) | 極高效(優化通信) |
| 顯存優化 | 無 | 一般 | 優秀(ZeRO階段1-3) |
| 適合場景 | 單機多卡 | 多機多卡 | 超大模型訓練 |
2. 關鍵概念解析
class DistributedTerms:def __init__(self):self.world_size = "參與訓練的進程總數"self.rank = "當前進程的全局ID"self.local_rank = "當前節點上的進程ID"self.backend = "通信后端(nccl/gloo/mpi)"self.init_method = "初始化方式(env/file/tcp)"二、DataParallel (DP) 實戰
1. 基礎DP實現
import torch
import torch.nn as nn
import torch.optim as optim
from torchvision import datasets, transforms
from torch.utils.data import DataLoader
import torch.nn.functional as F
?
# 設備設置 (自動使用所有可用GPU)
device = torch.device("cuda" if torch.cuda.is_available() else "cpu")
?
# 模型定義
class ConvNet(nn.Module):def __init__(self):super().__init__()self.conv1 = nn.Conv2d(3, 32, 3, 1)self.conv2 = nn.Conv2d(32, 64, 3, 1)self.fc1 = nn.Linear(64*6*6, 128)self.fc2 = nn.Linear(128, 10)def forward(self, x):x = F.relu(self.conv1(x))x = F.max_pool2d(x, 2)x = F.relu(self.conv2(x))x = F.max_pool2d(x, 2)x = x.view(-1, 64*6*6)x = F.relu(self.fc1(x))x = self.fc2(x)return x
?
# 數據準備
transform = transforms.Compose([transforms.ToTensor(),transforms.Normalize((0.5, 0.5, 0.5), (0.5, 0.5, 0.5))
])
train_dataset = datasets.CIFAR10(root='./data', train=True, download=True, transform=transform)
?
# 包裝模型為DP
model = ConvNet().to(device)
if torch.cuda.device_count() > 1:print(f"使用 {torch.cuda.device_count()} 個GPU!")model = nn.DataParallel(model)
?
# 訓練循環
train_loader = DataLoader(train_dataset, batch_size=256, shuffle=True)
optimizer = optim.Adam(model.parameters(), lr=0.001)
criterion = nn.CrossEntropyLoss()
?
for epoch in range(10):model.train()for batch_idx, (data, target) in enumerate(train_loader):data, target = data.to(device), target.to(device)optimizer.zero_grad()output = model(data)loss = criterion(output, target)loss.backward()optimizer.step()if batch_idx % 100 == 0:print(f"Epoch: {epoch} | Batch: {batch_idx}/{len(train_loader)} | Loss: {loss.item():.4f}")輸出為:
Epoch: 0 | Batch: 0/196 | Loss: 2.2991
Epoch: 0 | Batch: 100/196 | Loss: 1.4741
Epoch: 1 | Batch: 0/196 | Loss: 1.3207
Epoch: 1 | Batch: 100/196 | Loss: 1.1767
Epoch: 2 | Batch: 0/196 | Loss: 1.0995
Epoch: 2 | Batch: 100/196 | Loss: 1.0768
Epoch: 3 | Batch: 0/196 | Loss: 1.0013
Epoch: 3 | Batch: 100/196 | Loss: 0.8572
Epoch: 4 | Batch: 0/196 | Loss: 0.9214
Epoch: 4 | Batch: 100/196 | Loss: 0.8575
Epoch: 5 | Batch: 0/196 | Loss: 0.8531
Epoch: 5 | Batch: 100/196 | Loss: 0.9046
Epoch: 6 | Batch: 0/196 | Loss: 0.8146
Epoch: 6 | Batch: 100/196 | Loss: 0.6766
Epoch: 7 | Batch: 0/196 | Loss: 0.6395
Epoch: 7 | Batch: 100/196 | Loss: 0.6545
Epoch: 8 | Batch: 0/196 | Loss: 0.7298
Epoch: 8 | Batch: 100/196 | Loss: 0.7052
Epoch: 9 | Batch: 0/196 | Loss: 0.6747
Epoch: 9 | Batch: 100/196 | Loss: 0.60762. DP的局限性
class DPLimitations:def __init__(self):self.issues = ["單進程多線程導致GIL爭用","梯度聚合在單一GPU(主卡)形成瓶頸","顯存利用率不均衡(主卡OOM風險)","不支持多節點擴展"]self.solution = "使用DDP替代"三、DistributedDataParallel (DDP) 實戰
1. 單機多卡DDP實現
import torch
import torch.nn as nn
import torch.optim as optim
from torchvision import datasets, transforms
from torch.utils.data import DataLoader
import torch.nn.functional as F
import torch.distributed as dist
import torch.multiprocessing as mp
from torch.nn.parallel import DistributedDataParallel as DDP
import os
?
class ConvNet(nn.Module):def __init__(self):super().__init__()self.conv1 = nn.Conv2d(3, 32, 3, 1)self.conv2 = nn.Conv2d(32, 64, 3, 1)self.fc1 = nn.Linear(64 * 6 * 6, 128)self.fc2 = nn.Linear(128, 10)def forward(self, x):x = F.relu(self.conv1(x))x = F.max_pool2d(x, 2)x = F.relu(self.conv2(x))x = F.max_pool2d(x, 2)x = x.view(-1, 64 * 6 * 6)x = F.relu(self.fc1(x))x = self.fc2(x)return x
?
def ddp_setup(rank, world_size):os.environ['MASTER_ADDR'] = 'localhost'os.environ['MASTER_PORT'] = '12355'dist.init_process_group("nccl", rank=rank, world_size=world_size)torch.cuda.set_device(rank)
?
def cleanup():if dist.is_initialized():dist.destroy_process_group()
?
class DDPTrainer:def __init__(self, rank, world_size):self.rank = rankself.world_size = world_sizeself.model = ConvNet().to(rank)self.model = DDP(self.model, device_ids=[rank])self.optimizer = optim.Adam(self.model.parameters(), lr=0.001)self.criterion = nn.CrossEntropyLoss()self.train_loader = self._prepare_dataloader()def _prepare_dataloader(self):transform = transforms.Compose([transforms.ToTensor(),transforms.Normalize((0.5, 0.5, 0.5), (0.5, 0.5, 0.5))])dataset = datasets.CIFAR10(root='./data',train=True,download=True,transform=transform)sampler = torch.utils.data.distributed.DistributedSampler(dataset,num_replicas=self.world_size,rank=self.rank,shuffle=True)return DataLoader(dataset,batch_size=256,sampler=sampler,num_workers=2,pin_memory=True)def train(self, total_epochs=10):for epoch in range(total_epochs):self.model.train()self.train_loader.sampler.set_epoch(epoch) ?# 確保每個epoch有不同的shufflefor batch_idx, (data, target) in enumerate(self.train_loader):data, target = data.to(self.rank), target.to(self.rank)self.optimizer.zero_grad()output = self.model(data)loss = self.criterion(output, target)loss.backward()self.optimizer.step()if batch_idx % 100 == 0 and self.rank == 0: ?# 僅主進程打印print(f"Epoch: {epoch} | Batch: {batch_idx}/{len(self.train_loader)} | Loss: {loss.item():.4f}")if self.rank == 0:torch.save(self.model.module.state_dict(), "ddp_model.pth")
?
def main_ddp(rank, world_size):ddp_setup(rank, world_size)trainer = DDPTrainer(rank, world_size)trainer.train()cleanup()
?
if __name__ == "__main__":world_size = torch.cuda.device_count()mp.spawn(main_ddp, args=(world_size,), nprocs=world_size)輸出為:
Files already downloaded and verified
Epoch: 0 | Batch: 0/196 | Loss: 2.3034
Epoch: 0 | Batch: 100/196 | Loss: 1.4479
Epoch: 1 | Batch: 0/196 | Loss: 1.2776
Epoch: 1 | Batch: 100/196 | Loss: 1.3570
Epoch: 2 | Batch: 0/196 | Loss: 1.1137
Epoch: 2 | Batch: 100/196 | Loss: 0.9530
Epoch: 3 | Batch: 0/196 | Loss: 1.0887
Epoch: 3 | Batch: 100/196 | Loss: 0.8944
Epoch: 4 | Batch: 0/196 | Loss: 0.8131
Epoch: 4 | Batch: 100/196 | Loss: 0.9242
Epoch: 5 | Batch: 0/196 | Loss: 0.9026
Epoch: 5 | Batch: 100/196 | Loss: 1.0272
Epoch: 6 | Batch: 0/196 | Loss: 0.6772
Epoch: 6 | Batch: 100/196 | Loss: 0.8683
Epoch: 7 | Batch: 0/196 | Loss: 0.7747
Epoch: 7 | Batch: 100/196 | Loss: 0.7627
Epoch: 8 | Batch: 0/196 | Loss: 0.6991
Epoch: 8 | Batch: 100/196 | Loss: 0.7003
Epoch: 9 | Batch: 0/196 | Loss: 0.6409
Epoch: 9 | Batch: 100/196 | Loss: 0.66212. 多機DDP關鍵配置
def multi_machine_setup():config = {"init_method": "env://", ?# 使用環境變量初始化"environment_vars": {"MASTER_ADDR": "192.168.1.1", ?# 主節點IP"MASTER_PORT": "29500", ? ? ? ?# 開放端口"WORLD_SIZE": "8", ? ? ? ? ? ? # 總GPU數"RANK": "0-7" ? ? ? ? ? ? ? ? ?# 各節點rank},"per_machine_cmd": "python train.py --local_rank=$LOCAL_RANK","launcher": "torchrun" ?# 推薦使用torchrun替代mp.spawn}return config四、DeepSpeed 實戰
1. DeepSpeed基礎配置
# ds_config.json
{"train_batch_size": 32,"gradient_accumulation_steps": 1,"optimizer": {"type": "Adam","params": {"lr": 0.001,"betas": [0.8, 0.999],"eps": 1e-8,"weight_decay": 3e-7}},"fp16": {"enabled": true,"auto_cast": true,"loss_scale": 0,"loss_scale_window": 1000,"hysteresis": 2,"min_loss_scale": 1},"zero_optimization": {"stage": 2,"allgather_partitions": true,"allgather_bucket_size": 200000000,"overlap_comm": true,"reduce_scatter": true,"reduce_bucket_size": 200000000,"contiguous_gradients": true}}2. DeepSpeed訓練實現
import deepspeed
import torch.nn as nn
from torchvision import datasets, transforms
import torch.nn.functional as F
import argparse
?
?
class ConvNet(nn.Module):def __init__(self):super().__init__()self.conv1 = nn.Conv2d(3, 32, 3, 1)self.conv2 = nn.Conv2d(32, 64, 3, 1)self.fc1 = nn.Linear(64 * 6 * 6, 128)self.fc2 = nn.Linear(128, 10)
?def forward(self, x):# Convert input to match model's dtype if neededif next(self.parameters()).dtype != x.dtype:x = x.to(next(self.parameters()).dtype)
?x = F.relu(self.conv1(x))x = F.max_pool2d(x, 2)x = F.relu(self.conv2(x))x = F.max_pool2d(x, 2)x = x.view(-1, 64 * 6 * 6)x = F.relu(self.fc1(x))x = self.fc2(x)return x
?
?
def train_deepspeed(args):model = ConvNet()
?transform = transforms.Compose([transforms.ToTensor(),transforms.Normalize((0.5, 0.5, 0.5), (0.5, 0.5, 0.5))])dataset = datasets.CIFAR10(root='./data', train=True, download=True,transform=transform)
?# Initialize DeepSpeedmodel_engine, optimizer, train_loader, _ = deepspeed.initialize(args=args,model=model,model_parameters=model.parameters(),training_data=dataset)
?for epoch in range(args.epochs):model_engine.train()for batch_idx, (inputs, targets) in enumerate(train_loader):inputs = inputs.to(model_engine.device)targets = targets.to(model_engine.device)
?# Ensure inputs match model dtypeif model_engine.fp16_enabled():inputs = inputs.half()
?outputs = model_engine(inputs)loss = F.cross_entropy(outputs, targets)
?model_engine.backward(loss)model_engine.step()
?if batch_idx % 100 == 0 and model_engine.local_rank == 0:print(f"Epoch: {epoch} | Batch: {batch_idx} | Loss: {loss.item():.4f}")
?
?
def get_args():parser = argparse.ArgumentParser(description='DeepSpeed CIFAR10 Training')parser.add_argument('--epochs', type=int, default=10)parser.add_argument('--local_rank', type=int, default=-1)parser.add_argument('--deepspeed_config', type=str,default='ds_config.json',help='path to DeepSpeed config file')return parser.parse_args()
?
?
if __name__ == "__main__":args = get_args()train_deepspeed(args)# 運行腳本deepspeed --num_gpus=1 deepspeed_train.py --deepspeed_config ds_config.json,其中num_gpus指gpu數量
# 需要pip install deepspeed輸出為:
[2025-04-05 03:34:29,680] [INFO] [real_accelerator.py:239:get_accelerator] Setting ds_accelerator to cuda (auto detect)
[2025-04-05 03:34:31,203] [WARNING] [runner.py:215:fetch_hostfile] Unable to find hostfile, will proceed with training with local resources only.
[2025-04-05 03:34:31,203] [INFO] [runner.py:605:main] cmd = /root/miniforge3/bin/python3.10 -u -m deepspeed.launcher.launch --world_info=eyJsb2NhbGhvc3QiOiBbMF19 --master_addr=127.0.0.1 --master_port=29500 --enable_each_rank_log=None e38-3.py --deepspeed_config ds_config.json
[2025-04-05 03:34:32,803] [INFO] [real_accelerator.py:239:get_accelerator] Setting ds_accelerator to cuda (auto detect)
[2025-04-05 03:34:34,305] [INFO] [launch.py:139:main] 0 NV_LIBNCCL_DEV_PACKAGE=libnccl-dev=2.21.5-1+cuda12.4
[2025-04-05 03:34:34,305] [INFO] [launch.py:139:main] 0 NV_LIBNCCL_DEV_PACKAGE_VERSION=2.21.5-1
[2025-04-05 03:34:34,305] [INFO] [launch.py:139:main] 0 NCCL_VERSION=2.21.5-1
[2025-04-05 03:34:34,305] [INFO] [launch.py:139:main] 0 NV_LIBNCCL_DEV_PACKAGE_NAME=libnccl-dev
[2025-04-05 03:34:34,305] [INFO] [launch.py:139:main] 0 NV_LIBNCCL_PACKAGE=libnccl2=2.21.5-1+cuda12.4
[2025-04-05 03:34:34,305] [INFO] [launch.py:139:main] 0 NV_LIBNCCL_PACKAGE_NAME=libnccl2
[2025-04-05 03:34:34,305] [INFO] [launch.py:139:main] 0 NV_LIBNCCL_PACKAGE_VERSION=2.21.5-1
[2025-04-05 03:34:34,305] [INFO] [launch.py:146:main] WORLD INFO DICT: {'localhost': [0]}
[2025-04-05 03:34:34,305] [INFO] [launch.py:152:main] nnodes=1, num_local_procs=1, node_rank=0
[2025-04-05 03:34:34,305] [INFO] [launch.py:163:main] global_rank_mapping=defaultdict(<class 'list'>, {'localhost': [0]})
[2025-04-05 03:34:34,305] [INFO] [launch.py:164:main] dist_world_size=1
[2025-04-05 03:34:34,305] [INFO] [launch.py:168:main] Setting CUDA_VISIBLE_DEVICES=0
[2025-04-05 03:34:34,306] [INFO] [launch.py:256:main] process 13722 spawned with command: ['/root/miniforge3/bin/python3.10', '-u', 'e38-3.py', '--local_rank=0', '--deepspeed_config', 'ds_config.json']
[2025-04-05 03:34:35,911] [INFO] [real_accelerator.py:239:get_accelerator] Setting ds_accelerator to cuda (auto detect)
Files already downloaded and verified
[2025-04-05 03:34:38,546] [INFO] [logging.py:107:log_dist] [Rank -1] DeepSpeed info: version=0.16.5, git-hash=unknown, git-branch=unknown
[2025-04-05 03:34:38,546] [INFO] [comm.py:658:init_distributed] cdb=None
[2025-04-05 03:34:38,546] [INFO] [comm.py:689:init_distributed] Initializing TorchBackend in DeepSpeed with backend nccl
[2025-04-05 03:34:38,549] [INFO] [config.py:734:__init__] Config mesh_device None world_size = 1
[2025-04-05 03:34:38,992] [INFO] [logging.py:107:log_dist] [Rank 0] DeepSpeed Flops Profiler Enabled: False
Using /root/.cache/torch_extensions/py310_cu124 as PyTorch extensions root...
Detected CUDA files, patching ldflags
Emitting ninja build file /root/.cache/torch_extensions/py310_cu124/fused_adam/build.ninja...
/root/miniforge3/lib/python3.10/site-packages/torch/utils/cpp_extension.py:1964: UserWarning: TORCH_CUDA_ARCH_LIST is not set, all archs for visible cards are included for compilation.
If this is not desired, please set os.environ['TORCH_CUDA_ARCH_LIST'].warnings.warn(
Building extension module fused_adam...
Allowing ninja to set a default number of workers... (overridable by setting the environment variable MAX_JOBS=N)
ninja: no work to do.
Loading extension module fused_adam...
Time to load fused_adam op: 0.055249929428100586 seconds
[2025-04-05 03:34:39,049] [INFO] [logging.py:107:log_dist] [Rank 0] Using DeepSpeed Optimizer param name adam as basic optimizer
[2025-04-05 03:34:39,049] [INFO] [logging.py:107:log_dist] [Rank 0] Removing param_group that has no 'params' in the basic Optimizer
[2025-04-05 03:34:39,049] [INFO] [logging.py:107:log_dist] [Rank 0] DeepSpeed Basic Optimizer = FusedAdam
[2025-04-05 03:34:39,049] [INFO] [utils.py:59:is_zero_supported_optimizer] Checking ZeRO support for optimizer=FusedAdam type=<class 'deepspeed.ops.adam.fused_adam.FusedAdam'>
[2025-04-05 03:34:39,049] [INFO] [logging.py:107:log_dist] [Rank 0] Creating torch.float16 ZeRO stage 2 optimizer
[2025-04-05 03:34:39,049] [INFO] [stage_1_and_2.py:149:__init__] Reduce bucket size 200000000
[2025-04-05 03:34:39,049] [INFO] [stage_1_and_2.py:150:__init__] Allgather bucket size 200000000
[2025-04-05 03:34:39,050] [INFO] [stage_1_and_2.py:151:__init__] CPU Offload: False
[2025-04-05 03:34:39,050] [INFO] [stage_1_and_2.py:152:__init__] Round robin gradient partitioning: False
[2025-04-05 03:34:39,174] [INFO] [utils.py:781:see_memory_usage] Before initializing optimizer states
[2025-04-05 03:34:39,175] [INFO] [utils.py:782:see_memory_usage] MA 0.0 GB ? ? ? ? Max_MA 0.0 GB ? ? ? ? CA 0.02 GB ? ? ? ? Max_CA 0 GB
[2025-04-05 03:34:39,175] [INFO] [utils.py:789:see_memory_usage] CPU Virtual Memory: used = 3.37 GB, percent = 11.0%
[2025-04-05 03:34:39,285] [INFO] [utils.py:781:see_memory_usage] After initializing optimizer states
[2025-04-05 03:34:39,285] [INFO] [utils.py:782:see_memory_usage] MA 0.0 GB ? ? ? ? Max_MA 0.0 GB ? ? ? ? CA 0.02 GB ? ? ? ? Max_CA 0 GB
[2025-04-05 03:34:39,286] [INFO] [utils.py:789:see_memory_usage] CPU Virtual Memory: used = 3.37 GB, percent = 11.0%
[2025-04-05 03:34:39,286] [INFO] [stage_1_and_2.py:556:__init__] optimizer state initialized
[2025-04-05 03:34:39,380] [INFO] [utils.py:781:see_memory_usage] After initializing ZeRO optimizer
[2025-04-05 03:34:39,380] [INFO] [utils.py:782:see_memory_usage] MA 0.0 GB ? ? ? ? Max_MA 0.0 GB ? ? ? ? CA 0.02 GB ? ? ? ? Max_CA 0 GB
[2025-04-05 03:34:39,381] [INFO] [utils.py:789:see_memory_usage] CPU Virtual Memory: used = 3.37 GB, percent = 11.0%
[2025-04-05 03:34:39,381] [INFO] [logging.py:107:log_dist] [Rank 0] DeepSpeed Final Optimizer = DeepSpeedZeroOptimizer
[2025-04-05 03:34:39,381] [INFO] [logging.py:107:log_dist] [Rank 0] DeepSpeed using configured LR scheduler = None
[2025-04-05 03:34:39,381] [INFO] [logging.py:107:log_dist] [Rank 0] DeepSpeed LR Scheduler = None
[2025-04-05 03:34:39,381] [INFO] [logging.py:107:log_dist] [Rank 0] step=0, skipped=0, lr=[0.001], mom=[[0.8, 0.999]]
[2025-04-05 03:34:39,381] [INFO] [config.py:1000:print] DeepSpeedEngine configuration:
[2025-04-05 03:34:39,382] [INFO] [config.py:1004:print] ? activation_checkpointing_config {"partition_activations": false, "contiguous_memory_optimization": false, "cpu_checkpointing": false, "number_checkpoints": null, "synchronize_checkpoint_boundary": false, "profile": false
}
[2025-04-05 03:34:39,382] [INFO] [config.py:1004:print] ? aio_config ................... {'block_size': 1048576, 'queue_depth': 8, 'intra_op_parallelism': 1, 'single_submit': False, 'overlap_events': True, 'use_gds': False}
[2025-04-05 03:34:39,382] [INFO] [config.py:1004:print] ? amp_enabled .................. False
[2025-04-05 03:34:39,382] [INFO] [config.py:1004:print] ? amp_params ................... False
[2025-04-05 03:34:39,382] [INFO] [config.py:1004:print] ? autotuning_config ............ {"enabled": false, "start_step": null, "end_step": null, "metric_path": null, "arg_mappings": null, "metric": "throughput", "model_info": null, "results_dir": "autotuning_results", "exps_dir": "autotuning_exps", "overwrite": true, "fast": true, "start_profile_step": 3, "end_profile_step": 5, "tuner_type": "gridsearch", "tuner_early_stopping": 5, "tuner_num_trials": 50, "model_info_path": null, "mp_size": 1, "max_train_batch_size": null, "min_train_batch_size": 1, "max_train_micro_batch_size_per_gpu": 1.024000e+03, "min_train_micro_batch_size_per_gpu": 1, "num_tuning_micro_batch_sizes": 3
}
[2025-04-05 03:34:39,382] [INFO] [config.py:1004:print] ? bfloat16_enabled ............. False
[2025-04-05 03:34:39,382] [INFO] [config.py:1004:print] ? bfloat16_immediate_grad_update False
[2025-04-05 03:34:39,382] [INFO] [config.py:1004:print] ? checkpoint_parallel_write_pipeline False
[2025-04-05 03:34:39,382] [INFO] [config.py:1004:print] ? checkpoint_tag_validation_enabled True
[2025-04-05 03:34:39,382] [INFO] [config.py:1004:print] ? checkpoint_tag_validation_fail False
[2025-04-05 03:34:39,382] [INFO] [config.py:1004:print] ? comms_config ................. <deepspeed.comm.config.DeepSpeedCommsConfig object at 0x7f7f620f2b30>
[2025-04-05 03:34:39,382] [INFO] [config.py:1004:print] ? communication_data_type ...... None
[2025-04-05 03:34:39,382] [INFO] [config.py:1004:print] ? compression_config ........... {'weight_quantization': {'shared_parameters': {'enabled': False, 'quantizer_kernel': False, 'schedule_offset': 0, 'quantize_groups': 1, 'quantize_verbose': False, 'quantization_type': 'symmetric', 'quantize_weight_in_forward': False, 'rounding': 'nearest', 'fp16_mixed_quantize': False, 'quantize_change_ratio': 0.001}, 'different_groups': {}}, 'activation_quantization': {'shared_parameters': {'enabled': False, 'quantization_type': 'symmetric', 'range_calibration': 'dynamic', 'schedule_offset': 1000}, 'different_groups': {}}, 'sparse_pruning': {'shared_parameters': {'enabled': False, 'method': 'l1', 'schedule_offset': 1000}, 'different_groups': {}}, 'row_pruning': {'shared_parameters': {'enabled': False, 'method': 'l1', 'schedule_offset': 1000}, 'different_groups': {}}, 'head_pruning': {'shared_parameters': {'enabled': False, 'method': 'topk', 'schedule_offset': 1000}, 'different_groups': {}}, 'channel_pruning': {'shared_parameters': {'enabled': False, 'method': 'l1', 'schedule_offset': 1000}, 'different_groups': {}}, 'layer_reduction': {'enabled': False}}
[2025-04-05 03:34:39,382] [INFO] [config.py:1004:print] ? curriculum_enabled_legacy .... False
[2025-04-05 03:34:39,382] [INFO] [config.py:1004:print] ? curriculum_params_legacy ..... False
[2025-04-05 03:34:39,382] [INFO] [config.py:1004:print] ? data_efficiency_config ....... {'enabled': False, 'seed': 1234, 'data_sampling': {'enabled': False, 'num_epochs': 1000, 'num_workers': 0, 'pin_memory': False, 'curriculum_learning': {'enabled': False}, 'dynamic_batching': {'enabled': False, 'lr_scaling_method': 'linear', 'min_batch_size': 1, 'max_batch_size': None, 'sequence_picking_order': 'dataloader', 'verbose': False}}, 'data_routing': {'enabled': False, 'random_ltd': {'enabled': False, 'layer_token_lr_schedule': {'enabled': False}}}}
[2025-04-05 03:34:39,382] [INFO] [config.py:1004:print] ? data_efficiency_enabled ...... False
[2025-04-05 03:34:39,382] [INFO] [config.py:1004:print] ? dataloader_drop_last ......... False
[2025-04-05 03:34:39,382] [INFO] [config.py:1004:print] ? disable_allgather ............ False
[2025-04-05 03:34:39,383] [INFO] [config.py:1004:print] ? dump_state ................... False
[2025-04-05 03:34:39,383] [INFO] [config.py:1004:print] ? dynamic_loss_scale_args ...... {'init_scale': 65536, 'scale_window': 1000, 'delayed_shift': 2, 'consecutive_hysteresis': False, 'min_scale': 1}
[2025-04-05 03:34:39,383] [INFO] [config.py:1004:print] ? eigenvalue_enabled ........... False
[2025-04-05 03:34:39,383] [INFO] [config.py:1004:print] ? eigenvalue_gas_boundary_resolution 1
[2025-04-05 03:34:39,383] [INFO] [config.py:1004:print] ? eigenvalue_layer_name ........ bert.encoder.layer
[2025-04-05 03:34:39,383] [INFO] [config.py:1004:print] ? eigenvalue_layer_num ......... 0
[2025-04-05 03:34:39,383] [INFO] [config.py:1004:print] ? eigenvalue_max_iter .......... 100
[2025-04-05 03:34:39,383] [INFO] [config.py:1004:print] ? eigenvalue_stability ......... 1e-06
[2025-04-05 03:34:39,383] [INFO] [config.py:1004:print] ? eigenvalue_tol ............... 0.01
[2025-04-05 03:34:39,383] [INFO] [config.py:1004:print] ? eigenvalue_verbose ........... False
[2025-04-05 03:34:39,383] [INFO] [config.py:1004:print] ? elasticity_enabled ........... False
[2025-04-05 03:34:39,383] [INFO] [config.py:1004:print] ? flops_profiler_config ........ {"enabled": false, "recompute_fwd_factor": 0.0, "profile_step": 1, "module_depth": -1, "top_modules": 1, "detailed": true, "output_file": null
}
[2025-04-05 03:34:39,383] [INFO] [config.py:1004:print] ? fp16_auto_cast ............... True
[2025-04-05 03:34:39,383] [INFO] [config.py:1004:print] ? fp16_enabled ................. True
[2025-04-05 03:34:39,383] [INFO] [config.py:1004:print] ? fp16_master_weights_and_gradients False
[2025-04-05 03:34:39,383] [INFO] [config.py:1004:print] ? global_rank .................. 0
[2025-04-05 03:34:39,383] [INFO] [config.py:1004:print] ? grad_accum_dtype ............. None
[2025-04-05 03:34:39,383] [INFO] [config.py:1004:print] ? gradient_accumulation_steps .. 1
[2025-04-05 03:34:39,383] [INFO] [config.py:1004:print] ? gradient_clipping ............ 0.0
[2025-04-05 03:34:39,383] [INFO] [config.py:1004:print] ? gradient_predivide_factor .... 1.0
[2025-04-05 03:34:39,383] [INFO] [config.py:1004:print] ? graph_harvesting ............. False
[2025-04-05 03:34:39,383] [INFO] [config.py:1004:print] ? hybrid_engine ................ enabled=False max_out_tokens=512 inference_tp_size=1 release_inference_cache=False pin_parameters=True tp_gather_partition_size=8
[2025-04-05 03:34:39,383] [INFO] [config.py:1004:print] ? initial_dynamic_scale ........ 65536
[2025-04-05 03:34:39,383] [INFO] [config.py:1004:print] ? load_universal_checkpoint .... False
[2025-04-05 03:34:39,384] [INFO] [config.py:1004:print] ? loss_scale ................... 0
[2025-04-05 03:34:39,384] [INFO] [config.py:1004:print] ? memory_breakdown ............. False
[2025-04-05 03:34:39,384] [INFO] [config.py:1004:print] ? mics_hierarchial_params_gather False
[2025-04-05 03:34:39,384] [INFO] [config.py:1004:print] ? mics_shard_size .............. -1
[2025-04-05 03:34:39,384] [INFO] [config.py:1004:print] ? monitor_config ............... tensorboard=TensorBoardConfig(enabled=False, output_path='', job_name='DeepSpeedJobName') comet=CometConfig(enabled=False, samples_log_interval=100, project=None, workspace=None, api_key=None, experiment_name=None, experiment_key=None, online=None, mode=None) wandb=WandbConfig(enabled=False, group=None, team=None, project='deepspeed') csv_monitor=CSVConfig(enabled=False, output_path='', job_name='DeepSpeedJobName')
[2025-04-05 03:34:39,384] [INFO] [config.py:1004:print] ? nebula_config ................ {"enabled": false, "persistent_storage_path": null, "persistent_time_interval": 100, "num_of_version_in_retention": 2, "enable_nebula_load": true, "load_path": null
}
[2025-04-05 03:34:39,384] [INFO] [config.py:1004:print] ? optimizer_legacy_fusion ...... False
[2025-04-05 03:34:39,384] [INFO] [config.py:1004:print] ? optimizer_name ............... adam
[2025-04-05 03:34:39,384] [INFO] [config.py:1004:print] ? optimizer_params ............. {'lr': 0.001, 'betas': [0.8, 0.999], 'eps': 1e-08, 'weight_decay': 3e-07}
[2025-04-05 03:34:39,384] [INFO] [config.py:1004:print] ? pipeline ..................... {'stages': 'auto', 'partition': 'best', 'seed_layers': False, 'activation_checkpoint_interval': 0, 'pipe_partitioned': True, 'grad_partitioned': True}
[2025-04-05 03:34:39,384] [INFO] [config.py:1004:print] ? pld_enabled .................. False
[2025-04-05 03:34:39,384] [INFO] [config.py:1004:print] ? pld_params ................... False
[2025-04-05 03:34:39,384] [INFO] [config.py:1004:print] ? prescale_gradients ........... False
[2025-04-05 03:34:39,384] [INFO] [config.py:1004:print] ? scheduler_name ............... None
[2025-04-05 03:34:39,384] [INFO] [config.py:1004:print] ? scheduler_params ............. None
[2025-04-05 03:34:39,384] [INFO] [config.py:1004:print] ? seq_parallel_communication_data_type torch.float32
[2025-04-05 03:34:39,384] [INFO] [config.py:1004:print] ? sparse_attention ............. None
[2025-04-05 03:34:39,384] [INFO] [config.py:1004:print] ? sparse_gradients_enabled ..... False
[2025-04-05 03:34:39,384] [INFO] [config.py:1004:print] ? steps_per_print .............. None
[2025-04-05 03:34:39,384] [INFO] [config.py:1004:print] ? tensor_parallel_config ....... dtype=torch.float16 autotp_size=0 tensor_parallel=TPConfig(tp_size=1, tp_grain_size=1, mpu=None, tp_group=None) injection_policy_tuple=None keep_module_on_host=False replace_with_kernel_inject=False
[2025-04-05 03:34:39,384] [INFO] [config.py:1004:print] ? timers_config ................ enabled=True synchronized=True
[2025-04-05 03:34:39,384] [INFO] [config.py:1004:print] ? train_batch_size ............. 32
[2025-04-05 03:34:39,385] [INFO] [config.py:1004:print] ? train_micro_batch_size_per_gpu 32
[2025-04-05 03:34:39,385] [INFO] [config.py:1004:print] ? use_data_before_expert_parallel_ False
[2025-04-05 03:34:39,385] [INFO] [config.py:1004:print] ? use_node_local_storage ....... False
[2025-04-05 03:34:39,385] [INFO] [config.py:1004:print] ? wall_clock_breakdown ......... False
[2025-04-05 03:34:39,385] [INFO] [config.py:1004:print] ? weight_quantization_config ... None
[2025-04-05 03:34:39,385] [INFO] [config.py:1004:print] ? world_size ................... 1
[2025-04-05 03:34:39,385] [INFO] [config.py:1004:print] ? zero_allow_untested_optimizer False
[2025-04-05 03:34:39,385] [INFO] [config.py:1004:print] ? zero_config .................. stage=2 contiguous_gradients=True reduce_scatter=True reduce_bucket_size=200000000 use_multi_rank_bucket_allreduce=True allgather_partitions=True allgather_bucket_size=200000000 overlap_comm=True load_from_fp32_weights=True elastic_checkpoint=False offload_param=None offload_optimizer=None sub_group_size=1000000000 cpu_offload_param=None cpu_offload_use_pin_memory=None cpu_offload=None prefetch_bucket_size=50000000 param_persistence_threshold=100000 model_persistence_threshold=9223372036854775807 max_live_parameters=1000000000 max_reuse_distance=1000000000 gather_16bit_weights_on_model_save=False module_granularity_threshold=0 use_all_reduce_for_fetch_params=False stage3_gather_fp16_weights_on_model_save=False ignore_unused_parameters=True legacy_stage1=False round_robin_gradients=False zero_hpz_partition_size=1 zero_quantized_weights=False zero_quantized_nontrainable_weights=False zero_quantized_gradients=False zeropp_loco_param=None mics_shard_size=-1 mics_hierarchical_params_gather=False memory_efficient_linear=True pipeline_loading_checkpoint=False override_module_apply=True log_trace_cache_warnings=False
[2025-04-05 03:34:39,385] [INFO] [config.py:1004:print] ? zero_enabled ................. True
[2025-04-05 03:34:39,385] [INFO] [config.py:1004:print] ? zero_force_ds_cpu_optimizer .. True
[2025-04-05 03:34:39,385] [INFO] [config.py:1004:print] ? zero_optimization_stage ...... 2
[2025-04-05 03:34:39,385] [INFO] [config.py:990:print_user_config] ? json = {"train_batch_size": 32, "gradient_accumulation_steps": 1, "optimizer": {"type": "Adam", "params": {"lr": 0.001, "betas": [0.8, 0.999], "eps": 1e-08, "weight_decay": 3e-07}}, "fp16": {"enabled": true, "auto_cast": true, "loss_scale": 0, "loss_scale_window": 1000, "hysteresis": 2, "min_loss_scale": 1}, "zero_optimization": {"stage": 2, "allgather_partitions": true, "allgather_bucket_size": 2.000000e+08, "overlap_comm": true, "reduce_scatter": true, "reduce_bucket_size": 2.000000e+08, "contiguous_gradients": true}
}
[2025-04-05 03:34:40,640] [INFO] [loss_scaler.py:190:update_scale] [deepspeed] OVERFLOW! Rank 0 Skipping step. Attempted loss scale: 65536, but hysteresis is 2. Reducing hysteresis to 1
Epoch: 0 | Batch: 0 | Loss: 2.3125
[2025-04-05 03:34:40,646] [INFO] [loss_scaler.py:183:update_scale] [deepspeed] OVERFLOW! Rank 0 Skipping step. Attempted loss scale: 65536, reducing to 32768
Epoch: 0 | Batch: 100 | Loss: 1.8994
Epoch: 0 | Batch: 200 | Loss: 1.5488
Epoch: 0 | Batch: 300 | Loss: 1.7979
Epoch: 0 | Batch: 400 | Loss: 1.5400
Epoch: 0 | Batch: 500 | Loss: 1.3965
Epoch: 0 | Batch: 600 | Loss: 1.6631
Epoch: 0 | Batch: 700 | Loss: 1.4385
Epoch: 0 | Batch: 800 | Loss: 1.1826
Epoch: 0 | Batch: 900 | Loss: 1.2168
Epoch: 0 | Batch: 1000 | Loss: 1.3877
[2025-04-05 03:34:47,610] [INFO] [loss_scaler.py:190:update_scale] [deepspeed] OVERFLOW! Rank 0 Skipping step. Attempted loss scale: 65536, but hysteresis is 2. Reducing hysteresis to 1
[2025-04-05 03:34:47,617] [INFO] [loss_scaler.py:183:update_scale] [deepspeed] OVERFLOW! Rank 0 Skipping step. Attempted loss scale: 65536, reducing to 32768
Epoch: 0 | Batch: 1100 | Loss: 1.2227
Epoch: 0 | Batch: 1200 | Loss: 1.3486
Epoch: 0 | Batch: 1300 | Loss: 1.4824
Epoch: 0 | Batch: 1400 | Loss: 1.2939
Epoch: 0 | Batch: 1500 | Loss: 1.3477
Epoch: 1 | Batch: 0 | Loss: 1.0166
Epoch: 1 | Batch: 100 | Loss: 1.3037
Epoch: 1 | Batch: 200 | Loss: 0.9531
Epoch: 1 | Batch: 300 | Loss: 1.2051
Epoch: 1 | Batch: 400 | Loss: 1.1250
[2025-04-05 03:34:54,593] [INFO] [loss_scaler.py:190:update_scale] [deepspeed] OVERFLOW! Rank 0 Skipping step. Attempted loss scale: 65536, but hysteresis is 2. Reducing hysteresis to 1
[2025-04-05 03:34:54,599] [INFO] [loss_scaler.py:183:update_scale] [deepspeed] OVERFLOW! Rank 0 Skipping step. Attempted loss scale: 65536, reducing to 32768
Epoch: 1 | Batch: 500 | Loss: 1.0322
Epoch: 1 | Batch: 600 | Loss: 1.1992
Epoch: 1 | Batch: 700 | Loss: 0.9302
Epoch: 1 | Batch: 800 | Loss: 1.0225
Epoch: 1 | Batch: 900 | Loss: 0.9985
Epoch: 1 | Batch: 1000 | Loss: 1.0186
Epoch: 1 | Batch: 1100 | Loss: 0.7178
Epoch: 1 | Batch: 1200 | Loss: 1.0322
Epoch: 1 | Batch: 1300 | Loss: 1.3174
Epoch: 1 | Batch: 1400 | Loss: 1.0762
[2025-04-05 03:35:01,555] [INFO] [loss_scaler.py:190:update_scale] [deepspeed] OVERFLOW! Rank 0 Skipping step. Attempted loss scale: 65536, but hysteresis is 2. Reducing hysteresis to 1
[2025-04-05 03:35:01,560] [INFO] [loss_scaler.py:183:update_scale] [deepspeed] OVERFLOW! Rank 0 Skipping step. Attempted loss scale: 65536, reducing to 32768
Epoch: 1 | Batch: 1500 | Loss: 1.0664
Epoch: 2 | Batch: 0 | Loss: 0.7202
Epoch: 2 | Batch: 100 | Loss: 1.1133
Epoch: 2 | Batch: 200 | Loss: 0.7842
Epoch: 2 | Batch: 300 | Loss: 1.0312
Epoch: 2 | Batch: 400 | Loss: 0.8369
Epoch: 2 | Batch: 500 | Loss: 0.8916
Epoch: 2 | Batch: 600 | Loss: 0.8364
Epoch: 2 | Batch: 700 | Loss: 0.8110
Epoch: 2 | Batch: 800 | Loss: 0.8823
[2025-04-05 03:35:08,718] [INFO] [loss_scaler.py:190:update_scale] [deepspeed] OVERFLOW! Rank 0 Skipping step. Attempted loss scale: 65536, but hysteresis is 2. Reducing hysteresis to 1
[2025-04-05 03:35:08,725] [INFO] [loss_scaler.py:183:update_scale] [deepspeed] OVERFLOW! Rank 0 Skipping step. Attempted loss scale: 65536, reducing to 32768
Epoch: 2 | Batch: 900 | Loss: 0.9097
Epoch: 2 | Batch: 1000 | Loss: 0.7773
Epoch: 2 | Batch: 1100 | Loss: 0.6465
Epoch: 2 | Batch: 1200 | Loss: 0.8125
Epoch: 2 | Batch: 1300 | Loss: 1.2598
Epoch: 2 | Batch: 1400 | Loss: 0.9136
Epoch: 2 | Batch: 1500 | Loss: 0.9321
Epoch: 3 | Batch: 0 | Loss: 0.5562
Epoch: 3 | Batch: 100 | Loss: 0.9727
Epoch: 3 | Batch: 200 | Loss: 0.6489
Epoch: 3 | Batch: 300 | Loss: 0.8125
[2025-04-05 03:35:15,595] [INFO] [loss_scaler.py:190:update_scale] [deepspeed] OVERFLOW! Rank 0 Skipping step. Attempted loss scale: 65536, but hysteresis is 2. Reducing hysteresis to 1
[2025-04-05 03:35:15,600] [INFO] [loss_scaler.py:183:update_scale] [deepspeed] OVERFLOW! Rank 0 Skipping step. Attempted loss scale: 65536, reducing to 32768
Epoch: 3 | Batch: 400 | Loss: 0.6260
Epoch: 3 | Batch: 500 | Loss: 0.7510
Epoch: 3 | Batch: 600 | Loss: 0.6504
Epoch: 3 | Batch: 700 | Loss: 0.7002
Epoch: 3 | Batch: 800 | Loss: 0.9238
Epoch: 3 | Batch: 900 | Loss: 0.8267
Epoch: 3 | Batch: 1000 | Loss: 0.5518
Epoch: 3 | Batch: 1100 | Loss: 0.6138
Epoch: 3 | Batch: 1200 | Loss: 0.6401
Epoch: 3 | Batch: 1300 | Loss: 1.0996
[2025-04-05 03:35:22,512] [INFO] [loss_scaler.py:190:update_scale] [deepspeed] OVERFLOW! Rank 0 Skipping step. Attempted loss scale: 65536, but hysteresis is 2. Reducing hysteresis to 1
[2025-04-05 03:35:22,518] [INFO] [loss_scaler.py:183:update_scale] [deepspeed] OVERFLOW! Rank 0 Skipping step. Attempted loss scale: 65536, reducing to 32768
Epoch: 3 | Batch: 1400 | Loss: 0.7559
Epoch: 3 | Batch: 1500 | Loss: 0.8115
Epoch: 4 | Batch: 0 | Loss: 0.4153
Epoch: 4 | Batch: 100 | Loss: 0.8018
Epoch: 4 | Batch: 200 | Loss: 0.5034
Epoch: 4 | Batch: 300 | Loss: 0.7324
Epoch: 4 | Batch: 400 | Loss: 0.5508
Epoch: 4 | Batch: 500 | Loss: 0.6274
Epoch: 4 | Batch: 600 | Loss: 0.4768
Epoch: 4 | Batch: 700 | Loss: 0.6201
[2025-04-05 03:35:29,241] [INFO] [loss_scaler.py:190:update_scale] [deepspeed] OVERFLOW! Rank 0 Skipping step. Attempted loss scale: 65536, but hysteresis is 2. Reducing hysteresis to 1
[2025-04-05 03:35:29,247] [INFO] [loss_scaler.py:183:update_scale] [deepspeed] OVERFLOW! Rank 0 Skipping step. Attempted loss scale: 65536, reducing to 32768
Epoch: 4 | Batch: 800 | Loss: 0.9185
Epoch: 4 | Batch: 900 | Loss: 0.7114
Epoch: 4 | Batch: 1000 | Loss: 0.4934
Epoch: 4 | Batch: 1100 | Loss: 0.5396
Epoch: 4 | Batch: 1200 | Loss: 0.5234
Epoch: 4 | Batch: 1300 | Loss: 1.0225
Epoch: 4 | Batch: 1400 | Loss: 0.6353
Epoch: 4 | Batch: 1500 | Loss: 0.6787
Epoch: 5 | Batch: 0 | Loss: 0.3416
Epoch: 5 | Batch: 100 | Loss: 0.6562
Epoch: 5 | Batch: 200 | Loss: 0.3862
[2025-04-05 03:35:35,900] [INFO] [loss_scaler.py:190:update_scale] [deepspeed] OVERFLOW! Rank 0 Skipping step. Attempted loss scale: 65536, but hysteresis is 2. Reducing hysteresis to 1
[2025-04-05 03:35:35,905] [INFO] [loss_scaler.py:183:update_scale] [deepspeed] OVERFLOW! Rank 0 Skipping step. Attempted loss scale: 65536, reducing to 32768
Epoch: 5 | Batch: 300 | Loss: 0.6436
Epoch: 5 | Batch: 400 | Loss: 0.5190
Epoch: 5 | Batch: 500 | Loss: 0.4709
Epoch: 5 | Batch: 600 | Loss: 0.3555
Epoch: 5 | Batch: 700 | Loss: 0.5088
Epoch: 5 | Batch: 800 | Loss: 0.8574
Epoch: 5 | Batch: 900 | Loss: 0.5903
Epoch: 5 | Batch: 1000 | Loss: 0.4016
Epoch: 5 | Batch: 1100 | Loss: 0.4583
Epoch: 5 | Batch: 1200 | Loss: 0.4756
[2025-04-05 03:35:42,493] [INFO] [loss_scaler.py:190:update_scale] [deepspeed] OVERFLOW! Rank 0 Skipping step. Attempted loss scale: 65536, but hysteresis is 2. Reducing hysteresis to 1
[2025-04-05 03:35:42,499] [INFO] [loss_scaler.py:183:update_scale] [deepspeed] OVERFLOW! Rank 0 Skipping step. Attempted loss scale: 65536, reducing to 32768
Epoch: 5 | Batch: 1300 | Loss: 0.8867
Epoch: 5 | Batch: 1400 | Loss: 0.4451
Epoch: 5 | Batch: 1500 | Loss: 0.5991
Epoch: 6 | Batch: 0 | Loss: 0.3013
Epoch: 6 | Batch: 100 | Loss: 0.5547
Epoch: 6 | Batch: 200 | Loss: 0.4202
Epoch: 6 | Batch: 300 | Loss: 0.5542
Epoch: 6 | Batch: 400 | Loss: 0.5361
Epoch: 6 | Batch: 500 | Loss: 0.4175
Epoch: 6 | Batch: 600 | Loss: 0.2228
[2025-04-05 03:35:49,174] [INFO] [loss_scaler.py:190:update_scale] [deepspeed] OVERFLOW! Rank 0 Skipping step. Attempted loss scale: 65536, but hysteresis is 2. Reducing hysteresis to 1
[2025-04-05 03:35:49,179] [INFO] [loss_scaler.py:183:update_scale] [deepspeed] OVERFLOW! Rank 0 Skipping step. Attempted loss scale: 65536, reducing to 32768
Epoch: 6 | Batch: 700 | Loss: 0.4939
Epoch: 6 | Batch: 800 | Loss: 0.7461
Epoch: 6 | Batch: 900 | Loss: 0.4568
Epoch: 6 | Batch: 1000 | Loss: 0.3052
Epoch: 6 | Batch: 1100 | Loss: 0.3608
Epoch: 6 | Batch: 1200 | Loss: 0.3230
Epoch: 6 | Batch: 1300 | Loss: 0.7437
Epoch: 6 | Batch: 1400 | Loss: 0.3889
Epoch: 6 | Batch: 1500 | Loss: 0.4861
Epoch: 7 | Batch: 0 | Loss: 0.2820
[2025-04-05 03:35:56,089] [INFO] [loss_scaler.py:190:update_scale] [deepspeed] OVERFLOW! Rank 0 Skipping step. Attempted loss scale: 65536, but hysteresis is 2. Reducing hysteresis to 1
[2025-04-05 03:35:56,095] [INFO] [loss_scaler.py:183:update_scale] [deepspeed] OVERFLOW! Rank 0 Skipping step. Attempted loss scale: 65536, reducing to 32768
Epoch: 7 | Batch: 100 | Loss: 0.4968
Epoch: 7 | Batch: 200 | Loss: 0.4492
Epoch: 7 | Batch: 300 | Loss: 0.4956
Epoch: 7 | Batch: 400 | Loss: 0.4265
Epoch: 7 | Batch: 500 | Loss: 0.3296
Epoch: 7 | Batch: 600 | Loss: 0.2382
Epoch: 7 | Batch: 700 | Loss: 0.3796
Epoch: 7 | Batch: 800 | Loss: 0.7739
Epoch: 7 | Batch: 900 | Loss: 0.3135
Epoch: 7 | Batch: 1000 | Loss: 0.3032
[2025-04-05 03:36:02,665] [INFO] [loss_scaler.py:190:update_scale] [deepspeed] OVERFLOW! Rank 0 Skipping step. Attempted loss scale: 65536, but hysteresis is 2. Reducing hysteresis to 1
[2025-04-05 03:36:02,672] [INFO] [loss_scaler.py:183:update_scale] [deepspeed] OVERFLOW! Rank 0 Skipping step. Attempted loss scale: 65536, reducing to 32768
Epoch: 7 | Batch: 1100 | Loss: 0.3655
Epoch: 7 | Batch: 1200 | Loss: 0.2328
Epoch: 7 | Batch: 1300 | Loss: 0.5957
Epoch: 7 | Batch: 1400 | Loss: 0.3350
Epoch: 7 | Batch: 1500 | Loss: 0.3853
Epoch: 8 | Batch: 0 | Loss: 0.1986
Epoch: 8 | Batch: 100 | Loss: 0.3679
Epoch: 8 | Batch: 200 | Loss: 0.4087
Epoch: 8 | Batch: 300 | Loss: 0.4595
Epoch: 8 | Batch: 400 | Loss: 0.3025
Epoch: 8 | Batch: 500 | Loss: 0.2805
[2025-04-05 03:36:09,754] [INFO] [loss_scaler.py:190:update_scale] [deepspeed] OVERFLOW! Rank 0 Skipping step. Attempted loss scale: 65536, but hysteresis is 2. Reducing hysteresis to 1
[2025-04-05 03:36:09,761] [INFO] [loss_scaler.py:183:update_scale] [deepspeed] OVERFLOW! Rank 0 Skipping step. Attempted loss scale: 65536, reducing to 32768
Epoch: 8 | Batch: 600 | Loss: 0.1461
Epoch: 8 | Batch: 700 | Loss: 0.2495
Epoch: 8 | Batch: 800 | Loss: 0.7319
Epoch: 8 | Batch: 900 | Loss: 0.2815
Epoch: 8 | Batch: 1000 | Loss: 0.2094
Epoch: 8 | Batch: 1100 | Loss: 0.2241
Epoch: 8 | Batch: 1200 | Loss: 0.2345
Epoch: 8 | Batch: 1300 | Loss: 0.5073
Epoch: 8 | Batch: 1400 | Loss: 0.3091
Epoch: 8 | Batch: 1500 | Loss: 0.3027
[2025-04-05 03:36:16,435] [INFO] [loss_scaler.py:190:update_scale] [deepspeed] OVERFLOW! Rank 0 Skipping step. Attempted loss scale: 65536, but hysteresis is 2. Reducing hysteresis to 1
[2025-04-05 03:36:16,440] [INFO] [loss_scaler.py:183:update_scale] [deepspeed] OVERFLOW! Rank 0 Skipping step. Attempted loss scale: 65536, reducing to 32768
Epoch: 9 | Batch: 0 | Loss: 0.2148
Epoch: 9 | Batch: 100 | Loss: 0.2515
Epoch: 9 | Batch: 200 | Loss: 0.3958
Epoch: 9 | Batch: 300 | Loss: 0.3501
[2025-04-05 03:36:19,196] [INFO] [loss_scaler.py:183:update_scale] [deepspeed] OVERFLOW! Rank 0 Skipping step. Attempted loss scale: 32768, reducing to 16384
Epoch: 9 | Batch: 400 | Loss: 0.3362
Epoch: 9 | Batch: 500 | Loss: 0.2739
Epoch: 9 | Batch: 600 | Loss: 0.2272
Epoch: 9 | Batch: 700 | Loss: 0.2355
Epoch: 9 | Batch: 800 | Loss: 0.5708
Epoch: 9 | Batch: 900 | Loss: 0.1432
Epoch: 9 | Batch: 1000 | Loss: 0.2303
Epoch: 9 | Batch: 1100 | Loss: 0.2595
Epoch: 9 | Batch: 1200 | Loss: 0.1442
Epoch: 9 | Batch: 1300 | Loss: 0.4683
Epoch: 9 | Batch: 1400 | Loss: 0.2491
Epoch: 9 | Batch: 1500 | Loss: 0.2827
[rank0]:[W405 03:36:27.708658550 ProcessGroupNCCL.cpp:1250] Warning: WARNING: process group has NOT been destroyed before we destruct ProcessGroupNCCL. On normal program exit, the application should call destroy_process_group to ensure that any pending NCCL operations have finished in this process. In rare cases this process can exit before this point and block the progress of another member of the process group. This constraint has always been present, but this warning has only been added since PyTorch 2.4 (function operator())
[2025-04-05 03:36:28,420] [INFO] [launch.py:351:main] Process 13722 exits successfully.3. ZeRO階段對比
| ZeRO階段 | 顯存優化 | 通信量 | 適用場景 |
|---|---|---|---|
| 階段0 | 無 | 正常 | 基線對比 |
| 階段1 | 優化器狀態分區 | 低 | 中等規模模型 |
| 階段2 | +梯度分區 | 中 | 大規模模型 |
| 階段3 | +參數分區 | 高 | 超大規模模型 |
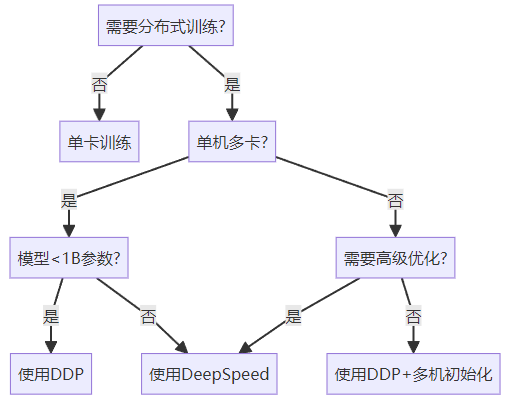
五、選擇指南
六、總結與展望
本文全面介紹了三種分布式訓練方法:
-
DP:適合快速原型開發,但存在明顯瓶頸
-
DDP:生產環境首選,支持多機多卡
-
DeepSpeed:專為超大模型設計,提供ZeRO優化
典型使用場景:
-
單機4卡以下:DDP
-
多機訓練:DDP + torchrun
-
10B+參數模型:DeepSpeed + ZeRO-3
在下一篇文章中,我們將深入解析注意力機制,從Seq2Seq到Transformer的完整演進歷程,揭示現代深度學習架構的核心思想。










)





)

 —— 上篇)
