無人機在復雜地形與危險環境中的自主路徑規劃是保障任務順利執行的關鍵問題。本文針對山地環境下單無人機三維路徑規劃難題,提出了一種基于粒子群算法(PSO)的優化方法。首先,建立了包含真實地形高程、危險區域和飛行約束條件的三維環境模型;其次,將無人機飛行路徑編碼為導航點序列,并設計了綜合目標函數,綜合考慮了路徑長度、飛行高度偏差和平滑性,同時通過懲罰函數處理危險區域和安全高度約束;最后,利用改進的粒子群算法搜索最優路徑,并引入變異算子與模擬退火機制增強算法的全局尋優能力。實驗結果表明,該方法能夠在較少迭代次數內快速收斂,得到的路徑不僅能有效避開危險區域和復雜地形,而且在長度與平滑性上表現優良,驗證了所提方法在無人機三維路徑規劃問題上的有效性和可行性。
作者:張家梁(自研改進)
引言
近年來,無人機(Unmanned Aerial Vehicle, UAV)因其靈活機動、成本低廉等優勢,在軍事偵察、災害監測、環境探測和物流運輸等領域得到廣泛應用。然而,在復雜山地環境和存在危險區域的場景中,無人機的自主路徑規劃問題仍面臨巨大挑戰。一方面,三維地形起伏劇烈、障礙物和危險區域分布復雜,使得路徑規劃不僅需要保證安全性,還需兼顧飛行距離與能耗;另一方面,傳統的確定性規劃方法在高維搜索空間中易陷入局部最優,難以滿足實時性和全局優化的雙重要求。
智能優化算法因其全局搜索能力和魯棒性,成為解決無人機路徑規劃的重要研究方向。其中,粒子群算法(Particle Swarm Optimization, PSO)以其簡單易實現、收斂速度快的特點,在路徑規劃問題上表現突出。但標準 PSO 容易早熟收斂,導致所得路徑質量有限。為此,本文提出了一種改進的 PSO 方法,將無人機路徑編碼為導航點序列,在綜合考慮路徑長度、飛行高度與平滑性的目標函數基礎上,引入危險區域和安全高度約束,并通過變異算子與模擬退火機制提升搜索多樣性與跳出局部最優的能力。
本文的主要貢獻包括:
(1)構建了包含地形高程、危險區與飛行約束的三維無人機路徑規劃模型;
(2)設計了綜合代價函數,實現了路徑長度、飛行高度與平滑度的多目標統一度量;
(3)提出了改進的 PSO 優化框架,有效提升了全局尋優性能;
(4)通過實驗驗證了所提方法在復雜環境下的有效性和優越性。
系統架構
1.系統概述
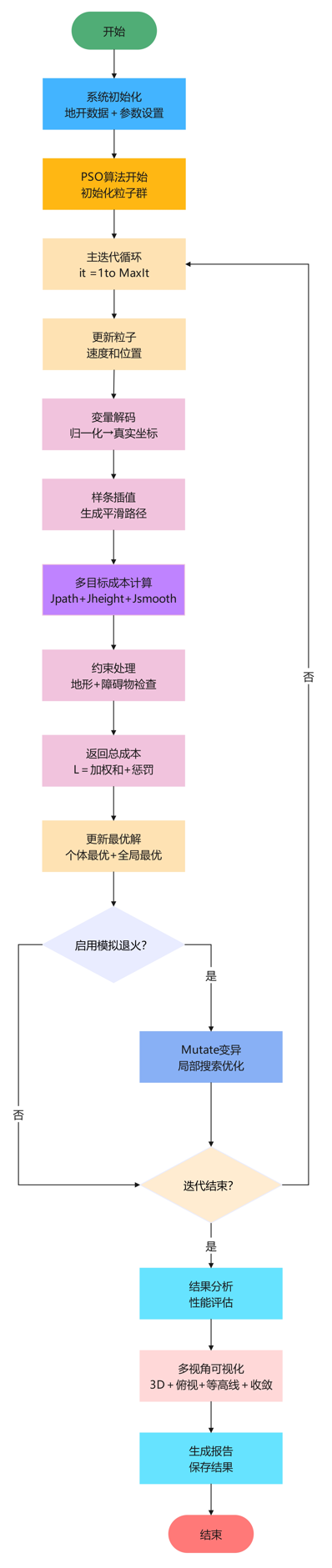
本系統旨在為單無人機在復雜山地環境和危險區域約束條件下提供安全、可行且高效的三維路徑規劃方案。系統采用改進的粒子群算法作為核心優化引擎,將路徑規劃問題轉化為搜索空間中的全局優化問題,并通過綜合目標函數對路徑進行評價和選擇。
系統整體架構由以下幾個部分組成:
環境建模模塊
(1)輸入真實地形數據(高程網格)、起點與終點位置。
(2)定義危險區域(如禁飛區、障礙物位置與半徑)以及飛行安全高度約束。
(3)輸出三維飛行環境模型,為后續路徑規劃提供基礎。
路徑編碼與解碼模塊
(1)將無人機飛行路徑表示為若干導航點,并用歸一化向量進行編碼。
(2)在代價計算過程中,將歸一化解碼為實際三維坐標,并進行邊界修正。
目標函數與約束處理模塊
(1)綜合考慮路徑長度、飛行高度波動和平滑性,構建多目標加權代價函數。
(2)對進入危險區或低于安全高度的路徑加以懲罰,確保可行性。
優化求解模塊(粒子群算法)
(1)初始化粒子群位置與速度,迭代更新個體和群體最優解。
(2)引入變異算子和模擬退火機制,增強全局搜索能力,避免早熟收斂。
結果輸出與可視化模塊
(1)輸出最優路徑及對應代價指標。
(2)提供三維視角、俯視圖和等高線圖等多種可視化方式。
(3)繪制收斂曲線,展示算法性能。
通過上述模塊的協同工作,系統能夠在復雜三維環境下快速生成符合安全與性能要求的無人機飛行路徑,既保證了避障和安全性,又兼顧了路徑的長度與平滑度,從而為無人機在危險區域執行任務提供有效支持。
2.系統流程圖
研究方法
研究方法: 本文通過建立包含地形與危險區約束的三維環境模型,設計綜合目標函數,并采用改進粒子群算法搜索無人機的最優飛行路徑。
實驗結果
實驗結果表明: 基于粒子群算法的無人機三維路徑規劃方法在復雜山地環境和危險區域約束條件下能夠快速收斂,并在較少迭代次數內獲得穩定解。規劃得到的路徑能夠有效避開危險區和地形高峰,滿足安全高度要求,整體飛行距離較為合理,同時在平滑性方面表現良好,轉角變化較小,具有較好的可飛行性。收斂曲線顯示目標函數在約 50 代后趨于穩定,進一步驗證了該算法在無人機路徑規劃問題上的收斂效率與穩定性。
運行runpso.m
圖1:無人機三維路徑規劃地形圖
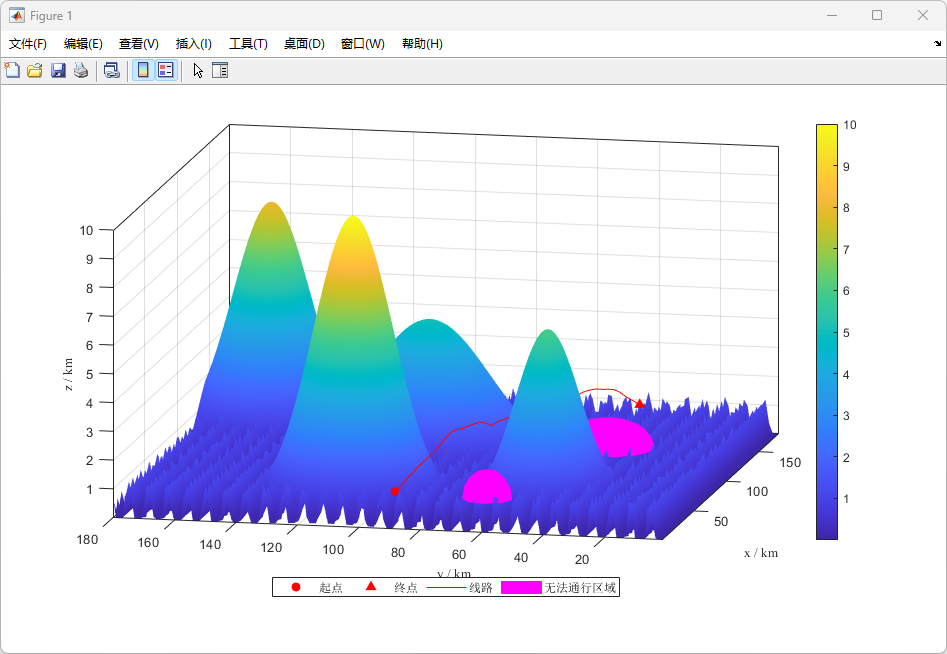
圖意:展示三維地形表面(彩色高程圖),起點(紅圓點)、終點(紅三角)、規劃路徑(紅線),以及危險區域(紫色半透明體)。
分析:算法在復雜地形與危險區約束下給出一條可行路徑,能有效避開“無法通行區域”,說明 PSO 優化出的路徑滿足基本安全約束。
圖2:無人機路徑規劃俯視圖(高度圖投影)
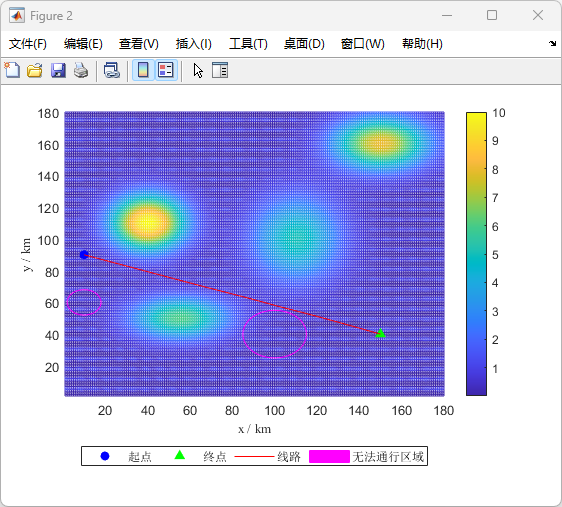
圖意:二維平面視角下的高度分布(彩色表示地形高度),路徑紅線為規劃結果,起終點分別用藍色圓點和綠色三角表示,危險區在平面上以紫色圓形覆蓋。
分析:路徑在平面上清晰地繞過了危險區域,保持整體方向性較好,說明優化兼顧了避障與飛行距離。
圖3:無人機路徑規劃等高線圖
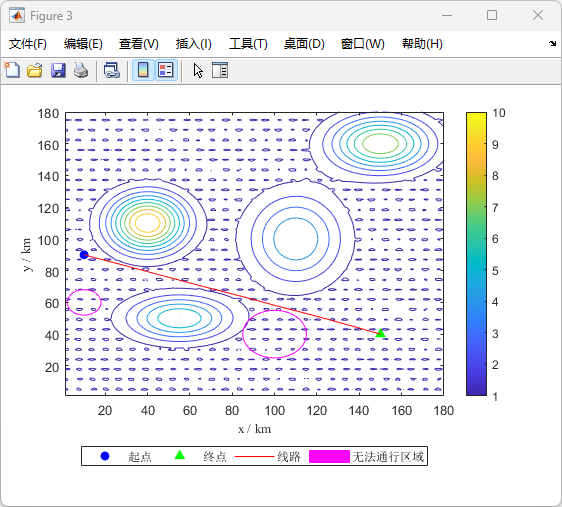
圖意:等高線表示地形起伏,路徑與起終點同樣標記,危險區顯示為紫色圈。
分析:通過等高線能更直觀地看到路徑繞避地形高峰與障礙區的方式,進一步驗證路徑可行性與合理性。
圖5:目標函數收斂曲線
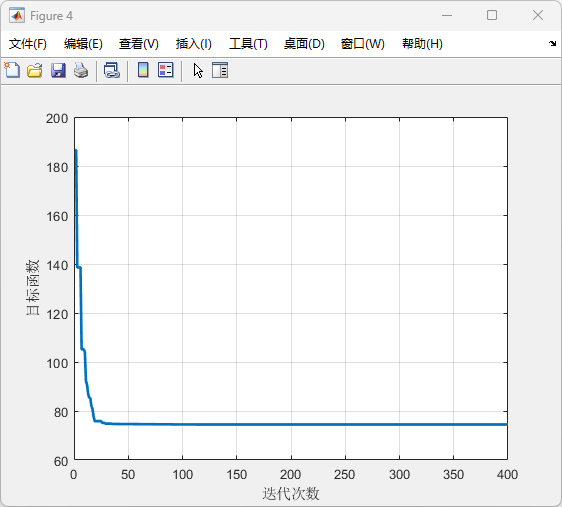
圖意:縱軸為目標函數值(綜合代價),橫軸為迭代次數。
分析:曲線在前幾十代快速下降,隨后趨于平穩,表明粒子群算法在約 50 代后已找到較優解,收斂速度較快且穩定。
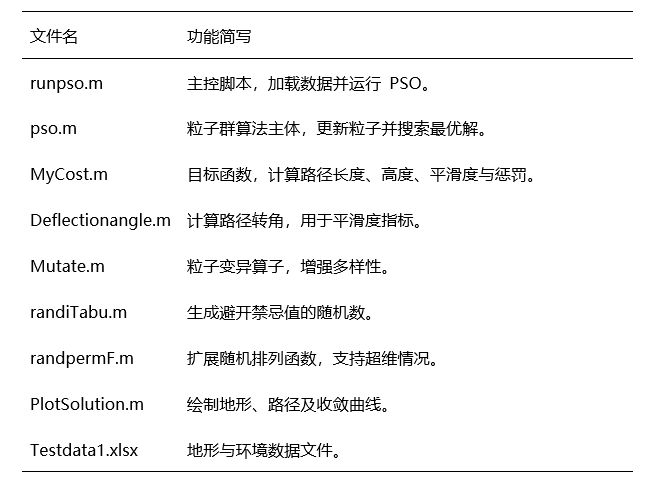
系統實現
本系統完全基于MATLAB平臺開發,主要集成以下腳本與模塊:
研究結論
本文針對單無人機在復雜山地環境和危險區域約束條件下的三維路徑規劃問題,提出了一種基于改進粒子群算法的求解方法。通過建立包含地形高程、危險區與飛行約束的三維環境模型,并設計綜合考慮路徑長度、飛行高度與平滑性的目標函數,結合懲罰函數實現對危險區與安全高度的約束處理,系統能夠有效生成可行路徑。實驗結果表明,該方法在較少迭代次數內即可收斂到穩定解,所得到的飛行路徑不僅能有效避開危險區域和復雜地形,還在路徑長度與平滑性方面表現優良,驗證了改進粒子群算法在無人機三維路徑規劃問題中的有效性和實用價值。
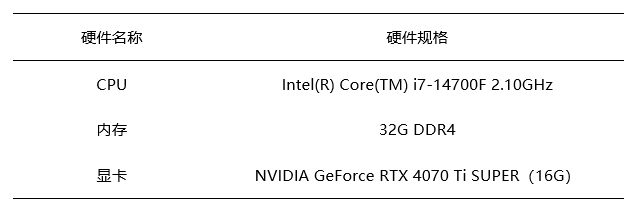
實驗環境
硬件配置如表:實驗所用硬件平臺為惠普(HP)暗影精靈10臺式機整機,運行 Windows 11 64 位操作系統,作為模型訓練與測試的主要計算平臺,能夠良好支持Matlab的開發需求。
官方聲明
實驗環境真實性與合規性聲明:
本研究所使用的硬件與軟件環境均為真實可復現的配置,未采用虛構實驗平臺或虛擬模擬環境。實驗平臺為作者自主購買的惠普(HP)暗影精靈 10 臺式整機,具體硬件參數詳見表。軟件環境涵蓋操作系統、開發工具、深度學習框架、MATLAB工具等,具體配置詳見表,所有軟件組件均來源于官方渠道或開源社區,并按照其許可協議合法安裝與使用。
研究過程中嚴格遵循學術誠信和實驗可復現性要求,確保所有實驗數據、訓練過程與結果均可在相同環境下被重復驗證,符合科研規范與工程實踐標準。
版權聲明:
本算法改進中涉及的文字、圖片、表格、程序代碼及實驗數據,除特別注明外,均由7zcode.張家梁獨立完成。未經7zcode官方書面許可,任何單位或個人不得擅自復制、傳播、修改、轉發或用于商業用途。如需引用本研究內容,請遵循學術規范,注明出處,并不得歪曲或誤用相關結論。
本研究所使用的第三方開源工具、框架及數據資源均已在文中明確標注,并嚴格遵守其相應的開源許可協議。使用過程中無違反知識產權相關法規,且全部用于非商業性學術研究用途。





)


)
-部署和使用指南)









