雙目立體視覺原理
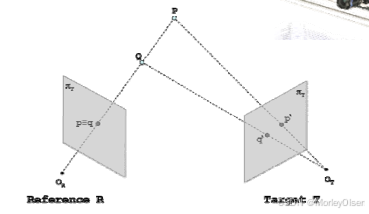
設一個為參考平面,一個為目標平面。增加了一個攝像頭后,P與Q在目標面T上有分別的成像點
雙目立體視覺:從兩個不同的位置觀察同一物體,用三角測量原理計算攝像機到該物體的距離的 方法
原理:三角測量
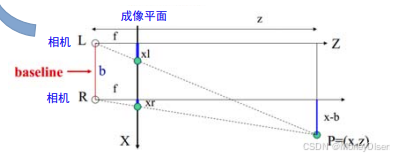
計算:
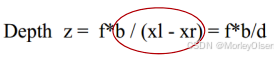
相機焦距 f?
左右相機基線 b
視差 d :需要知道左相機的每個像素點(xl, yl)和右相機中對應點(xr, yr)的對應關系
雙目相機標定
立體相機標定用于確定立體相機對中相機的內參以及相對位置
得到兩個相機的內外參數、單應矩陣
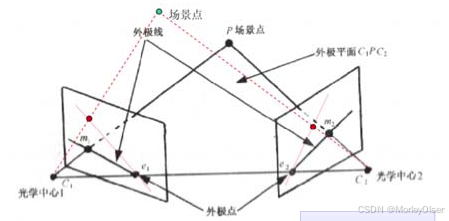
極線與視差計算
極線:
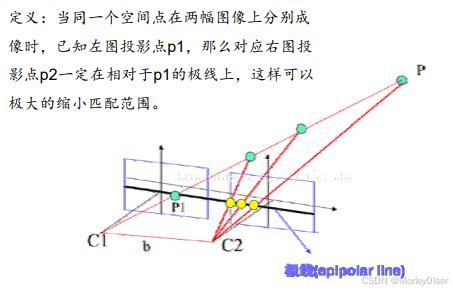
極線約束:在一個圖像平面上,所有的外極線都交于外極點
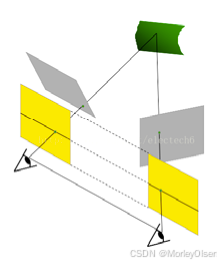
? ? ? ? 外極平面:通過兩個攝像機中心和場景特征點的平面
? ? ? ? 外極線:外極平面與圖像平面的交線
? ? ? ? 外極點:兩臺攝像機中心的連線與圖像平面的交點
相機C1,C2如果不是在同一直線上:對兩張圖片用單應矩陣變換
 互相平行
互相平行
圖像匹配
對應點應該是在極線附近,搜索范圍適當放寬
判斷對應點時的問題:
(1)失真與噪聲
(2)鏡面反射
(3)透視失真
(4)透視縮放
圖像“灰度”匹配:通過利用某種相似性度量,如相關函數、協方差函數、差平方和、差絕對值和等測度極值,判定兩幅圖像中的對應關系
圖像“特征”匹配:通過分別提取兩個或多個圖像的特征(點、線、面等特征),對特征進行參數描述,然后運用所描述的參數來進行匹配
“雙目立體視覺”測距步驟
Step 1-確定攝像機的相對幾何位置和有關參數,即攝像機的標定(Calibration)
Step 2-尋找在兩幅圖像中都便于區分的特征,或用于匹配的 基元
Step 3-把左、右兩幅圖像中的有關特征進行匹配,即解決特征匹配的方法問題
Step 4-根據視差計算成像物體相對攝像機的距離
“雙目立體視覺”應用特點
對相機硬件要求低,成本低
對環境光照非常敏感
不適用于單調缺乏紋理的場景
計算復雜度高,需要逐像素計算匹配
相機基線限制了測量范圍:基線越大,測量范圍越遠

)


![[密碼學基礎]國密算法深度解析:中國密碼標準的自主化之路](http://pic.xiahunao.cn/[密碼學基礎]國密算法深度解析:中國密碼標準的自主化之路)
 TCP/IP協議)



![【白雪講堂】[特殊字符]內容戰略地圖|GEO優化框架下的內容全景布局](http://pic.xiahunao.cn/【白雪講堂】[特殊字符]內容戰略地圖|GEO優化框架下的內容全景布局)


,多步能力協議(MCP) 和 A2A的區別)






