前言
參與?NVIDIA自動駕駛開發者實驗室?活動,以及解讀了??NVIDIA 安全報告 自動駕駛?白皮書,本文是我的一些思考和見解。自動駕駛技術的目標是為了改善道理安全、減少交通堵塞,重塑更安全、高效、包容的交通生態。在這一領域,NVIDIA 憑借其在 AI 與加速計算的深厚積累,構建了從芯片到軟件、從仿真到落地的全棧技術體系,成為全球車企和開發者的核心合作伙伴。可概括為三點:
-
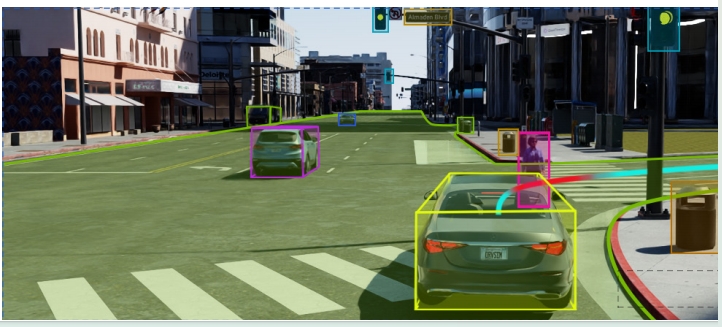
端到端 AI 驅動:通過統一模型覆蓋感知、規劃到控制的完整駕駛流程,減少傳統模塊化設計的復雜性與延遲。
-
物理精準仿真:借助 Omniverse 平臺生成極端場景的合成數據,覆蓋暴雨、夜間、復雜交通等高風險場景,降低實車測試風險。
-
冗余安全架構:基于 DRIVE AGX Orin/Thor 芯片的硬件冗余設計,結合 ISO 26262/21448 等國際安全標準,實現系統級故障容錯。
安全性上,NVIDIA 的自動駕駛技術以“零事故”為愿景,通過四大安全支柱構建防護閉環,從數據標注到道路測試的全鏈路均以安全為第一優先級。
?
見解
1. 安全模型:從仿真到落地的三重驗證
NVIDIA 提出“AI 訓練-仿真-車載部署”的鐵人三項開發模型,確保自動駕駛系統在虛擬與現實中均表現可靠:
-
AI 訓練:依托 DGX 超算集群,在 PB 級多樣化數據上訓練深度神經網絡(DNN),覆蓋全球不同地區的道路場景。
-
仿真驗證:通過 Omniverse 平臺生成高保真虛擬環境,模擬極端天氣、傳感器失效等罕見場景,驗證算法魯棒性。
-
車載部署:DRIVE AGX 車載計算機實時處理傳感器數據,結合冗余硬件與動態安全策略,確保車輛在故障時進入“最小風險狀態”。
自動駕駛汽車軟件開發傳統上基于模塊化方法,具有用于 物體檢測與跟蹤、軌跡預測以及路線規劃和控制的獨立組件。如今,自動駕駛汽車技術已邁入新時代 以大型、統一的 AI 模型為特色,可控制車輛堆棧從感知、規 ——AV 2.0。AV 2.0劃到控制的多個環節。與專注于使用多個深度神經網絡改進車輛感知能力的 AV1.0 到端駕駛 相比,AV 2.0 ”的方法來推動在動態、真實環境中的決策。 則需要全面的車載智能,借助一種稱為“端端到端自動駕駛系統采用統一的模型接收傳感器輸入并生 成車輛軌跡。這有助于避免過度復雜的流水線,并提供一種更全面的數據驅動方法以應對真實世界的場景
2. 四大安全支柱:技術驅動的防護閉環
支柱1:AI 設計與實施平臺
-
硬件:DRIVE AGX Orin/Thor SoC 提供 254-1000 TOPS 算力,支持 L2-L5 全級別自動駕駛,通過冗余設計(如雙芯片備份)實現故障容錯。
-
軟件:DriveOS 操作系統與 CUDA/TensorRT 加速庫,支持 20+ DNN 模型并行運行,融合攝像頭、雷達、激光雷達多傳感器數據。
-
優勢:統一架構可擴展升級,車企可基于同一平臺開發從輔助駕駛到完全自動駕駛的全系列產品。
參數:
NVIDIA DRIVE AGX Orin? SoC(片上系統)可提供高達254 TOPS 計算機。它是理想的解決方案,為自動駕駛功能、置信視 (每秒萬億次運算)的性能,是智能車輛的中央圖、數字集群以及 AI 駕駛艙提供動力支持。借助可擴展的DRIVE AGX Orin 建、擴展和利用一次開發投資,便可從 產品系列,開發者只需在整個車隊中構 L2+ 級系統一路升級至 L5 級全自動駕駛汽車系統DRIVE AGX Thor 計算機,將功能豐富的駕駛艙功能與高度自動化及自動 ? SoC 是我們的下一代集中式車載駕駛功能整合在一個安全可靠的系統上。這款自動駕 駛處理器采用了我們最新的 CPU 和 GPU 技術,包括NVIDIA Blackwell GPU 能。DRIVE AGX Thor 支持 架構,用于轉換器和生成式 8 位浮點數 (FP8),可提供前所 AI 功未有的 1,000 INT8 TOPS/1,000 FP8 TFLOPS/500 FP16TFLOPS 性能,同時降低整體系統成本
支柱2:深度學習基礎設施
-
數據工廠:標注 PB 級真實道路數據,結合 Omniverse Replicator 生成合成數據,填補罕見場景(如行人突然闖入)的數據空白。
-
訓練優化:DGX 超算集群支持分布式訓練,模型迭代效率提升 10 倍以上,確保 DNN 適應全球多樣化路況。
支柱3:物理精準傳感器仿真
-
仿真工具:Omniverse Cloud Sensor RTX 提供毫米波雷達、激光雷達的高精度建模,支持雨雪、霧霾等復雜天氣的傳感器性能測試。
-
價值:減少 80% 的實車測試成本,加速算法驗證周期。
支柱4:全方位安全與網絡安全
-
功能安全(ISO 26262):硬件/軟件全鏈路通過 ASIL D 級認證,確保單點故障不影響系統安全運行。
-
預期功能安全(SOTIF):通過仿真與道路測試驗證算法在無故障場景下的可靠性(如感知誤判率低于 0.001%)。
-
網絡安全(ISO/SAE 21434):多層加密、滲透測試、零日攻擊監控,防止惡意入侵導致車輛失控。
安全支柱關系圖
AI 平臺(硬件+軟件) ?
? ↓ ?
深度學習(數據+訓練) ?
? ↓ ?
傳感器仿真(場景覆蓋) ?
? ↓ ?
安全合規(功能+網絡) ?
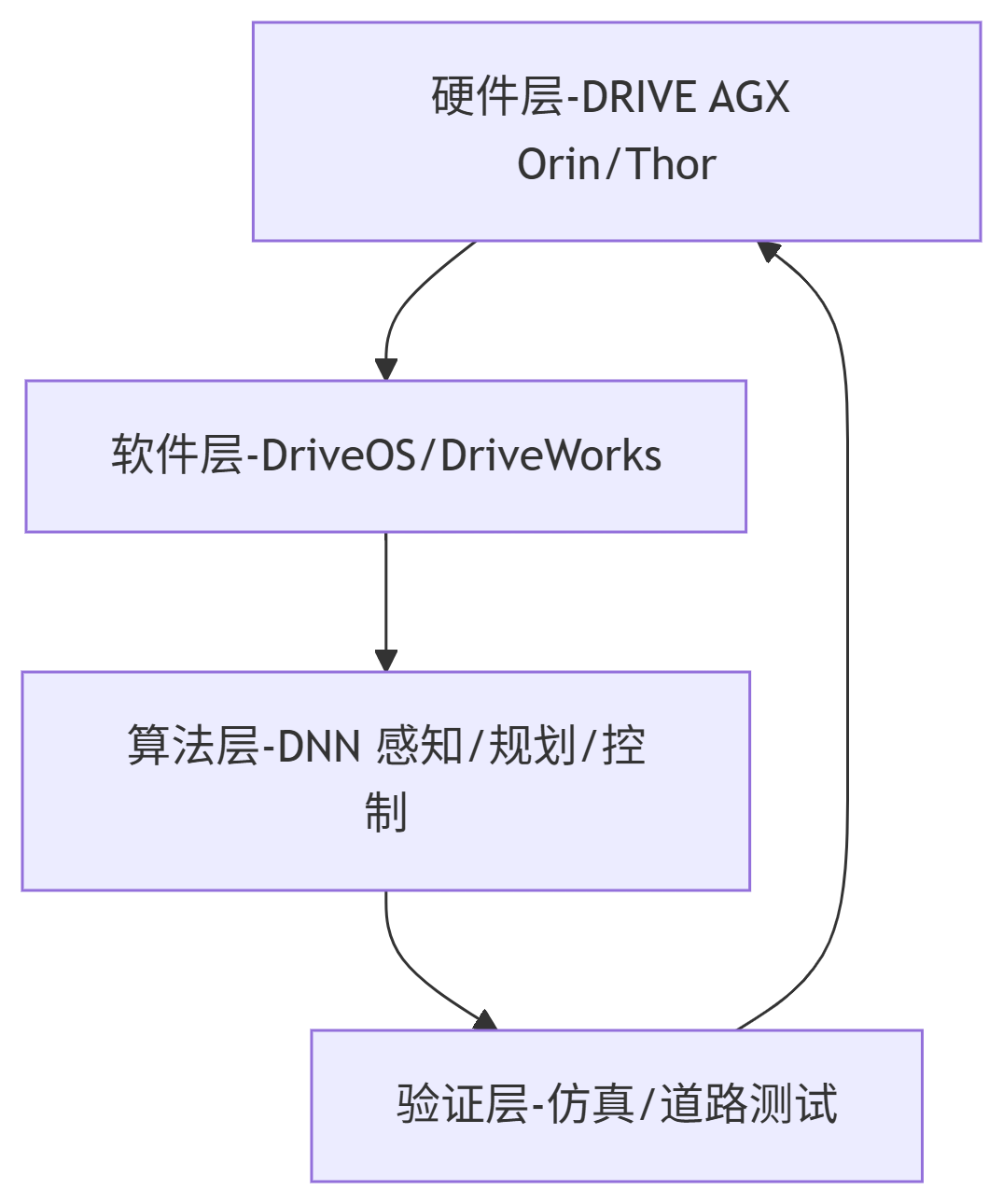
3. 安全架構:從芯片到系統的全棧防護
-
硬件層:DRIVE AGX 芯片集成 CPU/GPU/ASIC 模塊,通過物理隔離與冗余設計(如雙電源、雙通信通道)抵御硬件故障。
-
軟件層:DriveOS 提供實時任務調度與內存保護,DriveWorks 中間件實現傳感器融合與軌跡規劃,DNN 模型通過多幀跟蹤與多傳感器校驗提升感知可靠性。
-
驗證層:采用 V 模型開發流程,結合故障樹分析(FTA)與失效模式分析(FMEA),確保系統設計無缺陷。
最后
NVIDIA研發出了AV2.0大模型配置全面車載,可實現端到端自動駕駛,通過統一模型接受傳感器輸入的數據可生成車輛軌跡,提供一種更加全面的數據去驅動方法以模擬真實世界的場景。

,多步能力協議(MCP) 和 A2A的區別)

















