自動駕駛仿真領域常見開源工具
- 1、目錄
- 1.1 自動駕駛仿真領域常見開源
- 2、地圖&場景
- 2.1、場景播放器-Esmini
- 4、被測對象-智駕軟件
- 4.1、Autoware
- 4.4、端到端模型-VAD
- 4.5、端到端模型-UniAD
- 4.6、端到端模型-ThinkTwice
- 4.7、端到端模型-TCP
- 5、評價方法
- 5.1、Leaderboard
- 5.2、Bench2Drive
1、目錄
1.1 自動駕駛仿真領域常見開源
原文鏈接

為防止鏈接失效,搬運其中一些介紹。
1、仿真軟件
1.1、CARLA
CARLA 是一個開源的自動駕駛研究模擬器。它基于 Unreal Engine 運行模擬,采用 OpenDRIVE 標準定義道路和城市環境。其具有可擴展的服務器 - 多客戶端架構,支持同一或不同節點的多個客戶端控制不同參與者。通過靈活的 API,用戶能控制交通生成、行人行為、天氣、傳感器等模擬相關的所有方面。用戶還可配置包含激光雷達、攝像頭、深度傳感器和 GPS 等多樣化的自動駕駛傳感器套件。此外,CARLA 支持地圖生成、交通場景模擬,能與 ROS 集成,并提供自動駕駛基準,為自動駕駛系統的開發、訓練和驗證提供了豐富的功能和工具。

倉庫地址:Carla
1.2、LGSVL
LGSVL Simulator 是 LG 電子美國研發中心開發的基于 Unity 游戲引擎的開源自動駕駛仿真系統。它提供端到端的仿真,通過自定義通信 Bridge 與多種自動駕駛算法引擎接口進行消息傳遞,支持 ROS、ROS2 和 Cyber RT 消息,能與 Autoware、百度 Apollo 等開源自動駕駛引擎便捷集成。用戶可利用核心仿真引擎輕松定制傳感器、創建新型可控對象等,還可通過地圖工具導入導出多種格式的高精地圖。其能模擬逼真的 3D 環境、動態交通場景和各類傳感器,可用于自動駕駛系統的軟件在環和硬件在環測試,助力開發者降低測試成本,加速自動駕駛技術的研發與驗證。
1.8、渲染引擎
1.8.1、Unreal
Unreal 是一款強大的開源游戲開發引擎。它以高端的圖形渲染能力著稱,能夠創建出極其逼真的游戲畫面和沉浸式的虛擬環境。提供了豐富的工具和資源,涵蓋建模、動畫、特效等多個方面,方便開發者進行各種類型游戲的開發。其藍圖可視化腳本系統,讓非專業編程人員也能輕松實現復雜的游戲邏輯。Unreal 還支持跨平臺開發,可發布到 PC、主機、移動等多種平臺。同時,它在影視制作、建筑設計、教育培訓等領域也有廣泛應用,憑借其出色的功能和性能,成為全球眾多開發者和工作室青睞的開源軟件。
前文提到的自動駕駛仿真軟件CARLA / TADSim就是基于Unreal開發的哦。
1.8.2、Unity
Unity 是一款廣泛使用的跨平臺開源游戲開發軟件。它提供了豐富的工具和資源,讓開發者能輕松創建 2D、3D 游戲及其他互動內容。其可視化的開發界面便于操作,即使是初學者也能快速上手。Unity 擁有大量的插件和 Asset Store 資源,可幫助開發者節省開發時間和成本。同時,它支持多種平臺發布,包括 PC、移動設備、主機等,能滿足不同用戶的需求。此外,Unity 還有活躍的社區,開發者可以在社區中交流經驗、分享代碼,獲取技術支持,這使得 Unity 成為游戲開發領域中非常受歡迎的開源軟件之一。
前文提到的自動駕駛仿真軟件LGSVL / self driving car simulator 就是基于Unity開發的哦。
2、地圖&場景
2.1、場景播放器-Esmini
Esmini 是一款由瑞典國家道路與交通研究所(VTI)開發的開源交通場景模擬器。它支持 OpenSCENARIO 標準,能依據該標準的場景描述文件精準創建各種復雜交通場景,為自動駕駛算法的開發與測試提供便利。通過 Esmini,用戶可靈活定義交通參與者的行為、路線等元素,模擬逼真的交通環境。其基于 OpenSCENARIO 的特性,使得它能與其他遵循該標準的軟件工具良好集成,方便研究人員和開發者在統一的場景描述規范下進行協同工作,推動自動駕駛技術的研究與發展,在自動駕駛領域有著廣泛的應用和重要的地位。

倉庫地址:esmini
4、被測對象-智駕軟件
被測對象,是相對于仿真測試來說的,其實指的就是智駕軟件。以下分享兩類智駕軟件。一類是基于規則的自動駕駛,一類是基于端到端的自動駕駛。
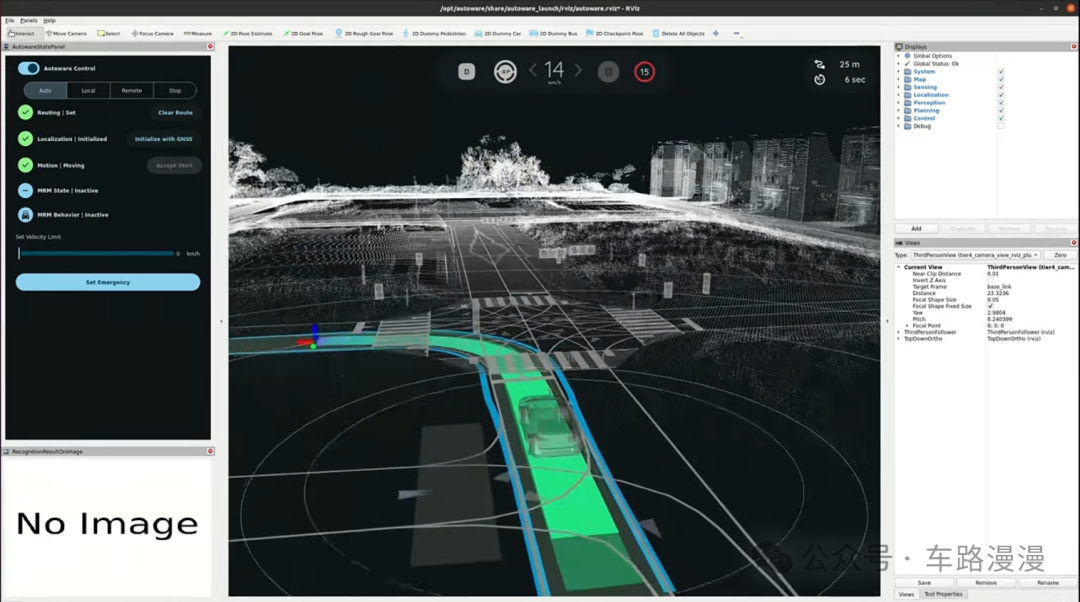
4.1、Autoware
Autoware 是基于 ROS 構建的領先開源自動駕駛軟件。它集成車輛定位、物體識別、路徑規劃和控制等關鍵功能,提供全棧式自動駕駛解決方案。分為 Autoware.Core 和 Autoware.Universe 兩大分支,前者基于ROS開發,注重穩定版本開發;后者基于ROS2開發,專注實驗性、前瞻性探索。其優勢眾多,包括模塊化架構便于定制擴展、可擴展性強能滿足多種應用、持續進化提升性能、應用場景廣泛。它支持多種傳感器,擁有活躍的社區和詳細的官方文檔,為全球開發者提供共享協作平臺,降低自動駕駛技術研發門檻,推動該領域技術發展。
倉庫地址:Autoware
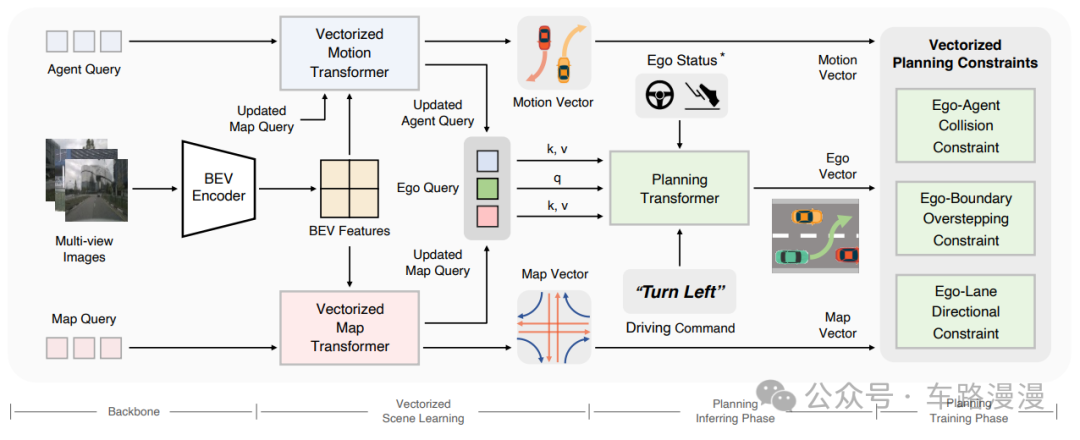
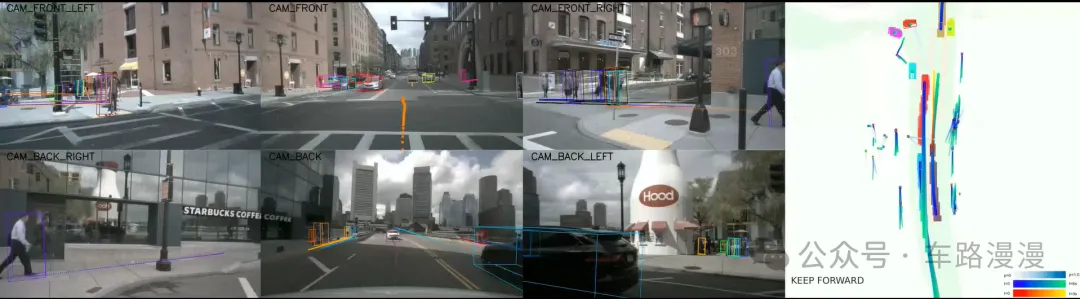
4.4、端到端模型-VAD
VAD (Vectorized Autonomous Driving)是由華中科技大學和地平線機器人公司的研究者共同開發的端到端自動駕駛開源軟件(一段式)。它將駕駛場景建模為完全向量化的表示,擯棄了計算密集的柵格表示和手工設計的后處理步驟,有效提升了規劃安全性和運行速度。其輸入為多幀、多視角圖像,輸出是自車未來規劃軌跡,框架分為圖像特征提取、向量化場景學習、規劃推理與訓練等階段。在nuScenes數據集和Carla模擬環境中,VAD都展現出卓越的性能,實現了當前最優的端到端規劃性能,為自動駕駛技術的研究和發展提供了有價值的參考。
倉庫地址:VAD
4.5、端到端模型-UniAD
UniAD 是 OpenDriveLab 開發的基于端到端自動駕駛的開源軟件。它旨在構建一個統一架構來處理自動駕駛中的感知、預測、規劃等多個任務。其原理是通過多模態數據融合,利用深度學習網絡將攝像頭、激光雷達等傳感器數據輸入,經神經網絡處理后直接輸出駕駛決策,減少傳統方法中各模塊間的復雜交互。在使用效果撒花姑娘,它能適應復雜的交通場景,展現出較好的泛化能力,可在不同的環境中做出合理決策。該模型為自動駕駛研究提供了新的思路和方案,其開源特性也方便全球開發者進行研究、改進,推動端到端自動駕駛技術不斷進步。
倉庫地址:uniad
4.6、端到端模型-ThinkTwice
ThinkTwice 是由 OpenDriveLab 開發、基于 PyTorch 實現的端到端自動駕駛開源模型,在 CVPR 2023 上發布。它采用鳥瞰圖(BEV)視角,通過多傳感器融合獲取 BEV 特征。其創新的解碼器包含 Look、Prediction 和 Refinement 模塊,能利用時空先驗知識和密集監督,以粗到細的方式預測車輛動作和軌跡。該模型在 Carla 模擬器上進行閉環評估,展現出先進的性能,為自動駕駛車輛在復雜場景中提供精確的路徑規劃和決策支持。其代碼結構清晰,文檔和示例詳細,方便研究者和開發者使用,推動了端到端自動駕駛技術的發展。
倉庫地址:ThinkTwice
4.7、端到端模型-TCP
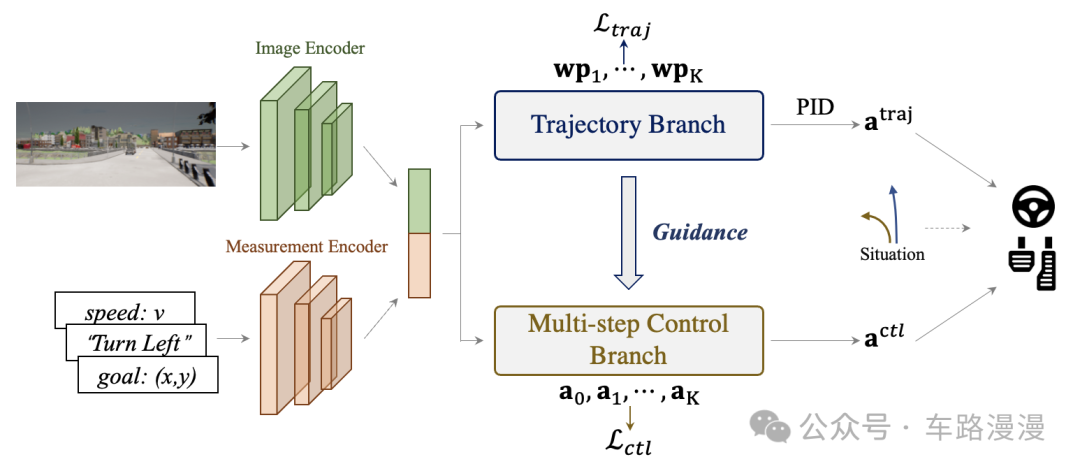
OpenDriveLab/TCP 是一個端到端的自動駕駛開源模型。它是結合軌跡規劃和控制預測的統一框架,通過研究兩種輸出形式的特點并將其整合,加入交互,根據先驗方案靈活結合兩分支輸出來獲得最佳最終控制信號。該模型僅使用單一單目相機作為輸入,就在 CARLA 自動駕駛排行榜上取得了第一名的成績,在不同測試環境和場景下,能出色應對各類挑戰性駕駛場景。其代碼遵循 Apache 2.0 許可協議,可在 GitHub 上獲取,包含了模型訓練、數據生成、評估等相關代碼和教程。
倉庫地址:TCP
5、評價方法
5.1、Leaderboard
CARLA Leaderboard 是基于 CARLA 仿真環境的擴展,用于評估自動駕駛算法的表現。它是一個開放平臺,能對自動駕駛智能體在現實交通場景中的駕駛能力進行公平、可重復的評估。用戶可通過配置文件定制評估流程,包括設定 CARLA 服務器地址和端口、測試路線、自動駕駛系統算法或模型、特殊場景、天氣條件及日志記錄等。自動駕駛智能體需按照預設路線行駛,路線涵蓋高速公路、城區、鄉村等場景及不同天氣條件。用戶可通過 sensor track 和 map track 兩種方式參與評估,前者提供傳感器模擬數據信息,后者在此基礎上還提供高精地圖信息。

5.2、Bench2Drive
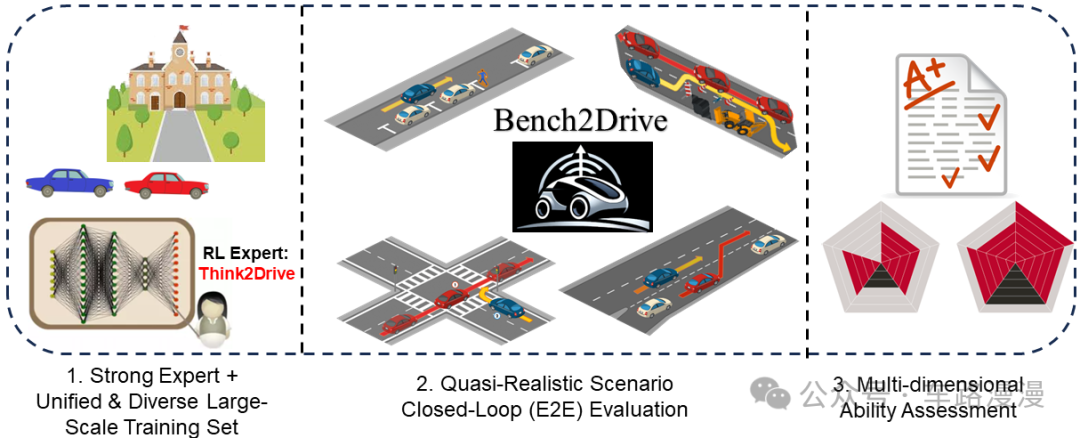
Bench2Drive 是首個以閉環方式評估端到端自動駕駛(E2E - AD)系統多種能力的基準測試平臺。其官方訓練數據由 200 萬幀完全標注的圖像組成,涵蓋 44 個交互場景、23 種天氣條件和 12 個城鎮。評估協議要求 E2E - AD 模型通過不同地點和天氣下的 44 個交互場景,共 220 條路線,以此全面評估其駕駛能力。Bench2Drive 采用成功率和駕駛分數等指標,還具備多樣化大規模官方訓練數據、細致的技能評估等特點,為研究人員提供了在現實、全面和公平的環境中優化和評估端到端自動駕駛系統的關鍵工具,推動自動駕駛領域的發展。

|SVM-拉格朗日乘數法理解)




)




與賽題)





 備份容量估算)
》免費中文翻譯 (第0章) --- Introduction)
