1. 算法思想
Flood Fill 問題的核心需求
給定一個二維網格(如像素矩陣)、一個起始坐標?(x, y)?和目標顏色?newColor,要求:
- 將起始點?
(x, y)?的顏色替換為?newColor。 - 遞歸地將所有與起始點相鄰(上下左右)?且顏色與起始點原始顏色相同的區域,也替換為?
newColor。
BFS 解決 Flood Fill 的算法思想
BFS 通過隊列實現 “逐層擴散”,步驟如下:
1. 記錄原始顏色,處理邊界情況
- 首先獲取起始點?
(x, y)?的原始顏色?oldColor。 - 若?
oldColor?與?newColor?相同,直接返回(無需填充,避免死循環)。
2. 初始化隊列,標記起始點
- 將起始點?
(x, y)?加入隊列,作為 BFS 的起點。 - 立即將起始點的顏色更新為?
newColor(或通過訪問標記記錄已處理,避免重復處理)。
3. 逐層擴散,填充相鄰區域
- 循環取出隊列中的節點?
(x, y),檢查其上下左右四個相鄰節點:- 若相鄰節點在網格范圍內(未越界)。
- 且相鄰節點的顏色為?
oldColor(與起始點原始顏色相同)。
- 則將該相鄰節點加入隊列,并立即更新其顏色為?
newColor(或標記為已處理)。
4. 隊列清空,完成填充
- 當隊列中所有節點都處理完畢后,所有與起始點連通的?
oldColor?區域已被替換為?newColor,算法結束。
示例:圖像著色(Flood Fill 經典場景)
假設有如下像素網格(oldColor=1,newColor=2,起始點?(1, 1)):
[[1, 1, 0],[1, 1, 0],[0, 0, 1]
]
BFS 執行過程:
- 起始點?
(1,1)?入隊,顏色更新為?2,隊列:[(1,1)]。 - 取出?
(1,1),檢查四鄰:(0,1)?是?1?→ 入隊,更新為?2;隊列:[(0,1)]。(2,1)?是?0?→ 跳過。(1,0)?是?1?→ 入隊,更新為?2;隊列:[(0,1), (1,0)]。(1,2)?是?0?→ 跳過。
- 取出?
(0,1),檢查四鄰:(0,0)?是?1?→ 入隊,更新為?2;隊列:[(1,0), (0,0)]。- 其他鄰點已處理或顏色不符,跳過。
- 取出?
(1,0)?和?(0,0),檢查其鄰點,均無未處理的?1,隊列清空。 - 最終結果(所有連通的?
1?均變為?2):
[[2, 2, 0],[2, 2, 0],[0, 0, 1]
]
關鍵邏輯解析
- 為什么用 BFS?:BFS 按 “距離起始點由近及遠” 的順序填充,適合需要 “逐層擴散” 的場景,且能保證所有連通區域被完整覆蓋。
- 避免重復處理:通過 “立即更新顏色為?
newColor” 替代單獨的訪問標記數組,節省空間(因為?oldColor != newColor,已處理節點不會被再次加入隊列)。 - 邊界檢查:每次訪問鄰點前需判斷?
x?和?y?是否在網格范圍內(0 ≤ x < 行數,0 ≤ y < 列數)。
算法復雜度
- 時間復雜度:
O(n*m),其中?n?為網格行數,m?為列數。每個單元格最多被訪問一次。 - 空間復雜度:
O(n*m),最壞情況下隊列需存儲所有單元格(如整個網格都是?oldColor?時)。
總結
BFS 解決 Flood Fill 的核心是用隊列管理待處理節點,逐層擴散并實時更新顏色,確保所有與起始點連通的相同顏色區域被高效、完整地填充。該思路直觀且易于實現,是處理連通區域填充問題的首選方法之一。
2. 例題
2.1 圖像渲染
733. 圖像渲染 - 力扣(LeetCode)
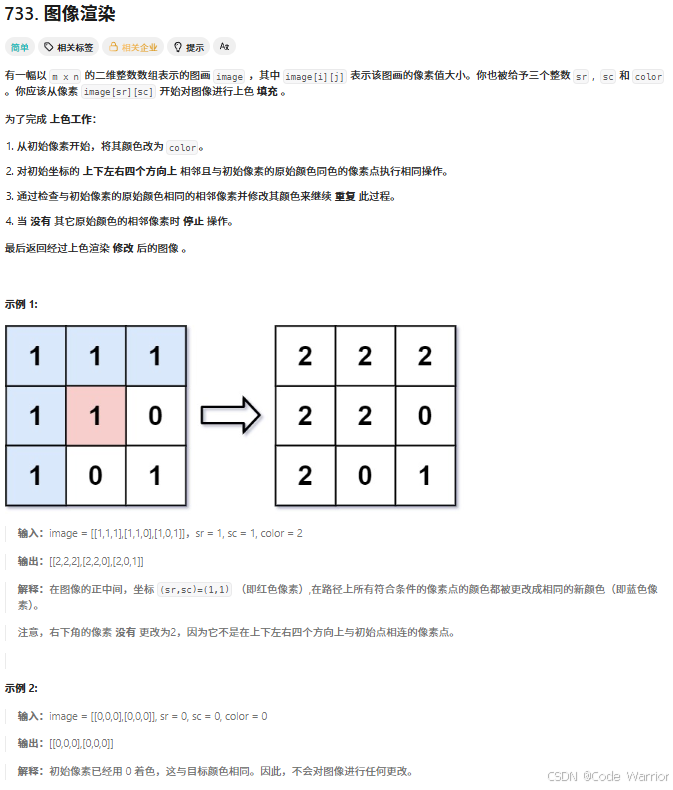
核心思路
-
顏色檢查與預處理:
- 獲取起始點?
(sr, sc)?的原始顏色?prev。 - 若?
prev?與目標顏色?color?相同,直接返回原圖(避免重復填充)。
- 獲取起始點?
-
BFS 初始化:
- 將起始點?
(sr, sc)?加入隊列?q。 - 獲取圖像的行數?
n?和列數?m,用于邊界檢查。
- 將起始點?
-
逐層擴散填充:
- 循環處理隊列中的每個點,將其顏色替換為?
color。 - 檢查該點的上下左右四個相鄰點:
- 若相鄰點在圖像范圍內且顏色等于?
prev,將其加入隊列。
- 若相鄰點在圖像范圍內且顏色等于?
- 隊列處理完畢后,所有連通的?
prev?顏色區域均被替換為?color。
- 循環處理隊列中的每個點,將其顏色替換為?
關鍵邏輯解析
-
為什么用 BFS?
BFS 按 “距離起始點由近及遠” 的順序處理節點,確保所有連通區域被完整覆蓋,且避免重復訪問。 -
如何避免重復處理?
當一個點被加入隊列時,立即將其顏色更新為?color。后續檢查相鄰點時,由于?image[x][y] == prev?的條件,已處理的點(顏色已變為?color)不會被重復加入隊列。 -
邊界檢查的重要性
x >= 0 && x < n && y >= 0 && y < m?確保不會越界訪問圖像。
示例演示
原圖(prev=1,color=2,起始點?(1, 1)):
[[1, 1, 0],[1, 1, 0],[0, 0, 1]
]
BFS 執行過程:
- 起始點?
(1,1)?入隊,顏色更新為?2,隊列:[(1,1)]。 - 處理?
(1,1),檢查四鄰:(0,1)?顏色為?1?→ 入隊,更新為?2。(1,0)?顏色為?1?→ 入隊,更新為?2。- 其他鄰點顏色為?
0?或越界,跳過。
- 處理?
(0,1),檢查四鄰:(0,0)?顏色為?1?→ 入隊,更新為?2。
- 處理?
(1,0)?和?(0,0),無符合條件的鄰點。 - 隊列為空,處理結束,結果:
[[2, 2, 0],[2, 2, 0],[0, 0, 1]
]
復雜度分析
- 時間復雜度:
O(n*m),其中?n?和?m?分別為圖像的行數和列數。每個像素最多被訪問一次。 - 空間復雜度:
O(n*m),最壞情況下隊列可能存儲所有像素(如整個圖像顏色相同)。
總結
該算法通過 BFS 高效地實現了 Flood Fill,核心在于利用隊列逐層擴散并實時更新顏色以避免重復處理。這種方法簡潔直觀,適用于處理圖像連通區域的填充問題。
?
class Solution {// 表示x和y坐標typedef pair<int, int> PII;// 上下左右四個方向的偏移量int dx[4] = {0, 0, 1, -1};int dy[4] = {1, -1, 0, 0};public:vector<vector<int>> floodFill(vector<vector<int>>& image, int sr, int sc, int color) {int prev = image[sr][sc];if(prev == color) return image;queue<PII> q;q.push({sr, sc});int n = image.size(), m = image[0].size();while(q.size()){auto [x1, y1] = q.front();q.pop();image[x1][y1] = color; for(int i = 0; i < 4; ++i){int x = x1 + dx[i], y = y1 + dy[i];// 找到四個方向符合條件的位置if(x >= 0 && x < n && y >= 0 && y < m && image[x][y] == prev){q.push({x, y}); }}}return image;}
};?
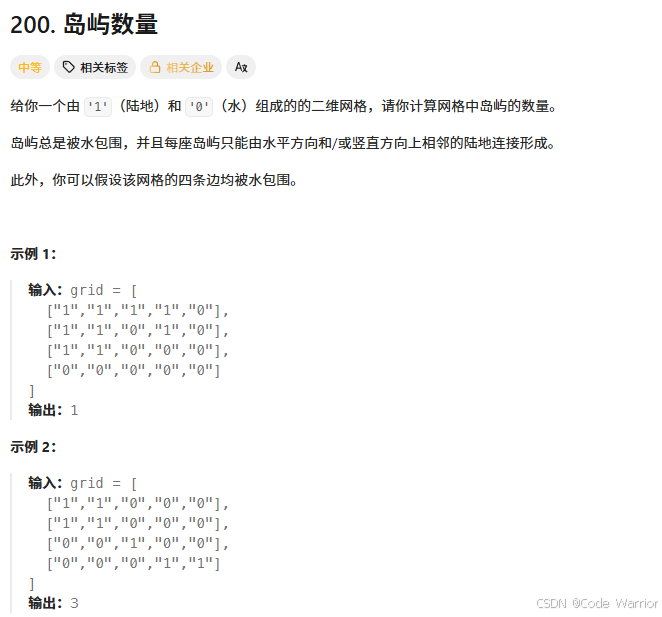
2.2 島嶼數量
200. 島嶼數量 - 力扣(LeetCode)
?
核心思路
-
遍歷網格,尋找未訪問的陸地
遍歷二維網格的每個單元格,當遇到值為?'1'(表示陸地)且未被訪問過(!vis[i][j])的單元格時,說明發現了一個新的島嶼。 -
BFS 擴散標記整個島嶼
對每個新發現的陸地單元格,啟動 BFS:- 將該單元格加入隊列,作為 BFS 的起點。
- 從隊列中取出單元格,檢查其上下左右四個相鄰單元格:
- 若相鄰單元格在網格范圍內(未越界)、值為?
'1'?且未被訪問過,則將其加入隊列,并標記為已訪問(vis[x][y] = true)。
- 若相鄰單元格在網格范圍內(未越界)、值為?
- 此過程會遞歸遍歷完當前島嶼的所有相連陸地,確保整個島嶼被完整標記。
-
計數島嶼數量
每啟動一次 BFS,代表發現并處理了一個完整的島嶼,因此計數器(ret)加 1。最終計數器的值即為網格中島嶼的總數量。
關鍵邏輯解析
vis?數組的作用:記錄已訪問的陸地單元格,避免重復統計同一島嶼的單元格。- BFS 的優勢:通過隊列實現 “逐層擴散”,確保所有與起始點連通的陸地都被標記,高效覆蓋整個島嶼。
- 邊界檢查:通過?
x >= 0 && x < n && y >= 0 && y < m?確保不訪問網格外的無效區域。
總結
算法通過遍歷網格發現新島嶼,利用 BFS 標記整個島嶼的所有陸地,最終統計島嶼數量。核心是用 BFS 實現連通區域的完整覆蓋和用訪問標記避免重復統計,時間復雜度為?O(n*m)(n、m?為網格行列數),每個單元格最多被訪問一次。
class Solution {typedef pair<int, int> PII;int dx[4] = {0, 0, 1, -1};int dy[4] = {1, -1, 0, 0};int n, m;bool vis[300][300];public:int numIslands(vector<vector<char>>& grid) {int ret = 0;n = grid.size(), m = grid[0].size();for(int i = 0; i < n; ++i){for(int j = 0; j < m; ++j){if(grid[i][j] == '1' && !vis[i][j]){++ret;dfs(grid, i, j);}}}return ret;}void dfs(vector<vector<char>>& grid, int i, int j){queue<PII> q;q.push({i, j});while(q.size()){auto [a, b] = q.front();q.pop();for(int k = 0; k < 4; ++k){int x = a + dx[k], y = b + dy[k];if(x >= 0 && x < n && y >= 0 && y < m && grid[x][y] == '1' && !vis[x][y]){q.push({x, y});vis[x][y] = true; }}}}
};?
2.3 島嶼的最大面積
695. 島嶼的最大面積 - 力扣(LeetCode)
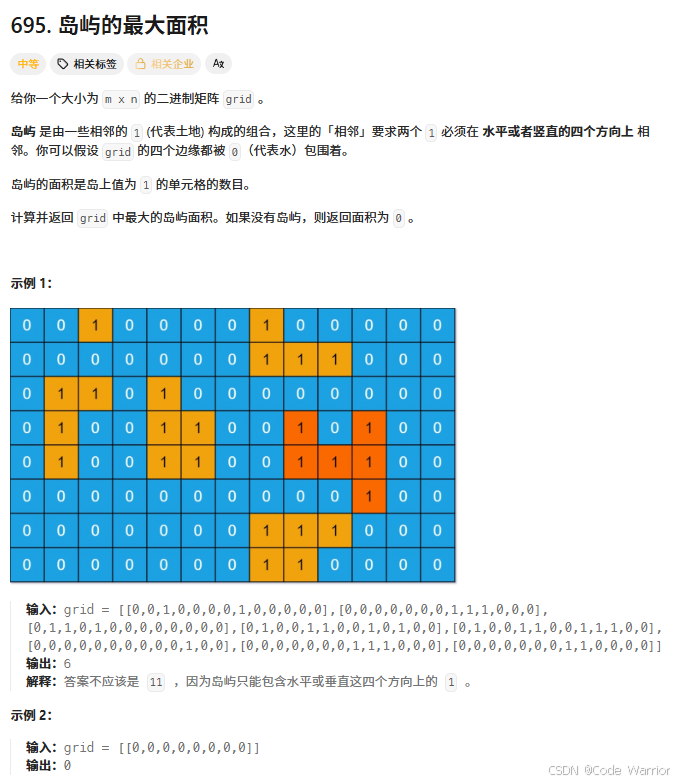
核心思路
-
遍歷網格,尋找未訪問的陸地
遍歷二維網格的每個單元格,當遇到值為?1(表示陸地)且未被訪問過(!vis[i][j])的單元格時,說明發現了一個新的島嶼。 -
BFS 計算當前島嶼面積
對每個新發現的陸地單元格,啟動 BFS 計算整個島嶼的面積:- 將該單元格加入隊列,標記為已訪問(
vis[i][j] = true),初始化面積計數器(count = 1)。 - 從隊列中取出單元格,檢查其上下左右四個相鄰單元格:
- 若相鄰單元格在網格范圍內、值為?
1?且未被訪問過,則將其加入隊列,標記為已訪問,并將面積計數器加 1。
- 若相鄰單元格在網格范圍內、值為?
- 隊列處理完畢后,
count?即為當前島嶼的面積。
- 將該單元格加入隊列,標記為已訪問(
-
更新最大島嶼面積
每次計算完一個島嶼的面積后,用當前面積更新全局最大面積(ret = max(ret, count))。遍歷結束后,ret?即為網格中最大島嶼的面積。
關鍵邏輯解析
vis?數組的作用:記錄已訪問的陸地單元格,避免重復計算同一島嶼的面積。- BFS 的優勢:通過隊列實現 “逐層擴散”,完整覆蓋當前島嶼的所有陸地,確保面積計算準確。
- 面積統計:從起始單元格開始,每納入一個新的陸地單元格,面積計數器就加 1,最終得到整個島嶼的面積。
總結
算法通過遍歷網格發現新島嶼,利用 BFS 計算每個島嶼的面積,實時更新最大面積。核心是用 BFS 完整覆蓋連通區域以計算面積和用訪問標記避免重復統計,時間復雜度為?O(n*m)(n、m?為網格行列數),每個單元格最多被訪問一次。
?
class Solution {typedef pair<int, int> PII;int dx[4] = {0, 0, 1, -1};int dy[4] = {1, -1, 0, 0};int vis[50][50];int n, m;int ret = 0;public:int maxAreaOfIsland(vector<vector<int>>& grid) {n = grid.size(), m = grid[0].size();for(int i = 0; i < n; ++i){for(int j = 0; j < m; ++j){if(grid[i][j] == 1 && !vis[i][j])dfs(grid, i, j);}}return ret;}void dfs(vector<vector<int>>& grid, int i, int j){queue<PII> q;q.push({i, j});vis[i][j] = true;int count = 1;while(q.size()){auto [a, b] = q.front();q.pop();for(int k = 0; k < 4; ++k){int x1 = a + dx[k], y1 = b + dy[k];if(x1 < n && x1 >= 0 && y1 < m && y1 >= 0 && grid[x1][y1] == 1 && !vis[x1][y1]){++count;q.push({x1, y1});vis[x1][y1] = true;}}}ret = max(ret, count);}
};?
2.4 被圍繞的區域
130. 被圍繞的區域 - 力扣(LeetCode)
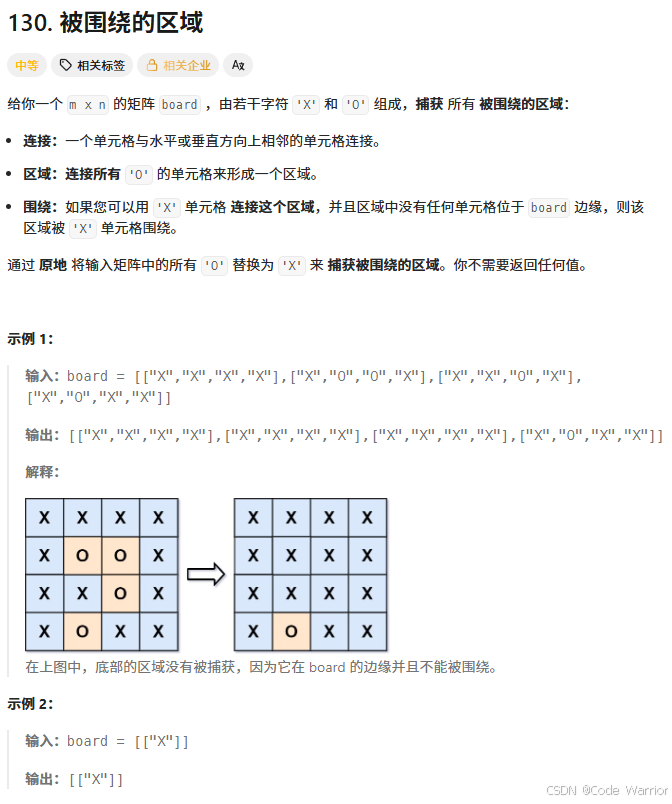
核心思想
-
遍歷網格,定位未訪問的 'O'
遍歷整個網格,當遇到值為 'O' 且未被訪問(!vis[i][j])的單元格時,啟動 BFS 處理該連通區域。 -
BFS 同步完成 “區域判斷” 與 “單元格記錄”
在一次 BFS 中同時實現兩個目標:- 記錄區域所有單元格:用
region數組存儲當前連通區域的所有 'O' 的坐標。 - 判斷區域是否被包圍:通過
hasEdge標記該區域是否包含邊緣單元格(位于網格邊界:x=0、x=n-1、y=0、y=m-1)。- 若區域包含邊緣單元格,
hasEdge設為false(不被包圍)。 - 若區域無邊緣單元格,
hasEdge保持true(被完全包圍)。
- 若區域包含邊緣單元格,
- 記錄區域所有單元格:用
-
根據判斷結果處理區域
BFS 結束后,若hasEdge為true(區域被包圍),則遍歷region數組,將所有記錄的 'O' 轉換為 'X';否則不處理(保留邊緣連通區域)。
關鍵邏輯解析
- 合并 BFS 的優勢:避免兩次遍歷同一區域,一次 BFS 同時完成 “判斷” 和 “記錄”,減少冗余操作,時間復雜度優化為
O(n*m)(n、m為網格行列數)。 region數組的作用:臨時存儲當前區域的所有單元格,便于后續批量轉換,無需二次遍歷尋找目標單元格。hasEdge標記的作用:實時追蹤區域是否接觸網格邊緣,決定該區域是否需要被轉換為 'X'。
總結
算法通過一次 BFS 實現 “判斷區域是否被包圍” 和 “記錄待處理單元格”,最終根據判斷結果批量轉換被包圍區域。核心是用一次遍歷同步完成多任務,既保證邏輯清晰,又提高了效率,完美解決 “被圍繞的區域” 問題。
?
class Solution {typedef pair<int, int> PII;int dx[4] = {0, 0, 1, -1};int dy[4] = {1, -1, 0, 0};int n, m;int vis[200][200];public:void solve(vector<vector<char>>& board) {n = board.size(), m = board[0].size();for(int i = 0; i < n; ++i){for(int j = 0; j < m; ++j){if(board[i][j] == 'O' && !vis[i][j]){bfs(board, i, j); }}}}void bfs(vector<vector<char>>& board, int i, int j) // 判斷有沒有任何單元格位于 board 邊緣{bool hasEdge = true;if(i == 0 || i == n - 1 || j == 0 || j == m - 1){hasEdge = false;}vector<PII> region;queue<PII> q;q.push({i, j});region.push_back({i, j});vis[i][j] = true;while(q.size()){auto [a, b] = q.front();q.pop();for(int k = 0; k < 4; ++k){int x = a + dx[k], y = b + dy[k];if(x >= 0 && x < n && y >= 0 && y < m && board[x][y] == 'O' && !vis[x][y]){vis[x][y] = true;if(x == 0 || x == n - 1 || y == 0 || y == m - 1){hasEdge = false;}q.push({x, y});region.push_back({x, y});}}}if(hasEdge){for(auto [x1, y1] : region)board[x1][y1] = 'X';}}
};?


技術全景:原理、實現與前沿應用深度解析)






排球賽事網站)



(遍歷輸入值的所有可枚舉屬性,將其轉換為文本表示)緩存序列化、狀態管理與時間旅行、replacer)





