好久不見~我又回來了
這一節我們來講一講圖像在計算機中的本質,以及全連接神經網絡的缺陷,進而引出卷積神經網絡
一、圖像在計算機中的本質
不知道你有沒有學過數據結構,在講這一部分的時候對數組進行了擴展,講到了廣義表和壓縮矩陣,其中壓縮矩陣用來壓縮圖像信息進行傳遞。
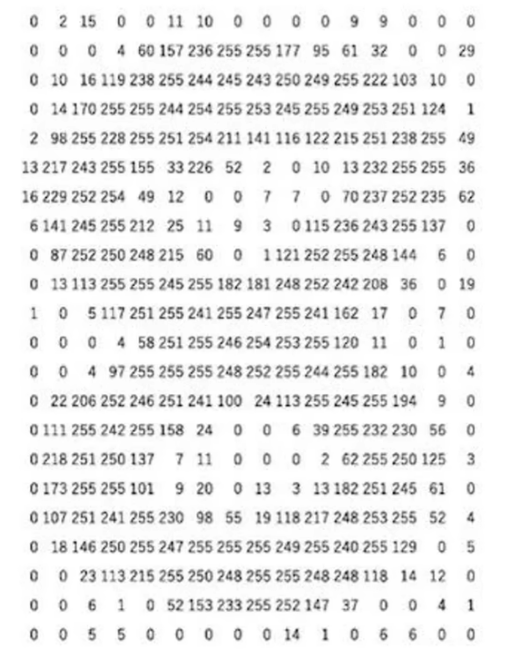
在計算機中,圖像本質上是一個數字矩陣。每個像素點對應一個數值,表示顏色或亮度信息。
具體來說:
-
對于灰度圖像,它是一個二維矩陣 I∈RH×WI \in \mathbb{R}^{H \times W}I∈RH×W,其中 HHH 是高度(行數),WWW 是寬度(列數),每個元素 I(i,j)I(i,j)I(i,j) 表示像素在位置 (i,j)(i,j)(i,j) 的灰度值(范圍通常為 000 到 255255255)。
-
例如下面這兩張圖
-

-
對于彩色圖像(如 RGB 格式),它是一個三維張量 I∈RH×W×CI \in \mathbb{R}^{H \times W \times C}I∈RH×W×C,其中 CCC 是通道數(通常 C=3C=3C=3,對應紅、綠、藍三個通道)。每個元素 I(i,j,k)I(i,j,k)I(i,j,k) 表示位置 (i,j)(i,j)(i,j) 在通道 kkk 的顏色強度。
例如,一個 32×3232 \times 3232×32 的 RGB 圖像可表示為:
I=[[I11R,I11G,I11B]?[I1WR,I1WG,I1WB]???[IH1R,IH1G,IH1B]?[IHWR,IHWG,IHWB]]
I = \begin{bmatrix}
[I_{11}^R, I_{11}^G, I_{11}^B] & \cdots & [I_{1W}^R, I_{1W}^G, I_{1W}^B] \\
\vdots & \ddots & \vdots \\
[I_{H1}^R, I_{H1}^G, I_{H1}^B] & \cdots & [I_{HW}^R, I_{HW}^G, I_{HW}^B]
\end{bmatrix}
I=?[I11R?,I11G?,I11B?]?[IH1R?,IH1G?,IH1B?]?????[I1WR?,I1WG?,I1WB?]?[IHWR?,IHWG?,IHWB?]??
這種表示方式便于計算機處理,但圖像數據通常維度很高(尤其是彩色圖片,如 1000×10001000 \times 10001000×1000 像素的圖像有 10610^6106 個元素),這給數據存儲和神經網絡處理帶來了挑戰。
二、壓縮矩陣
針對復雜的彩色圖片,圖像壓縮是必要的
原始圖像矩陣通常包含大量冗余數據(如相鄰像素相似),導致文件大小過大,不利于存儲或傳輸。壓縮的目標是減少數據量,同時保持視覺質量。
壓縮分為兩類:
- 無損壓縮:保留所有原始數據,如PNG格式,使用矩陣操作(如游程編碼)。
- 有損壓縮:犧牲少量細節以換取更高壓縮率,如JPEG格式,基于矩陣變換(如離散余弦變換)
壓縮過程直接操作圖像矩陣:
變換編碼:將圖像矩陣轉換為頻域表示,減少空間冗余。例如,在JPEG壓縮中,圖像被分成8×8塊,每個塊通過離散余弦變換(DCT)轉換為系數矩陣。DCT公式為: F(u,v)=2NC(u)C(v)∑i=0N?1∑j=0N?1f(i,j)cos?((2i+1)uπ2N)cos?((2j+1)vπ2N) F(u,v) = \frac{2}{N} C(u) C(v) \sum_{i=0}^{N-1} \sum_{j=0}^{N-1} f(i,j) \cos\left(\frac{(2i+1)u\pi}{2N}\right) \cos\left(\frac{(2j+1)v\pi}{2N}\right) F(u,v)=N2?C(u)C(v)i=0∑N?1?j=0∑N?1?f(i,j)cos(2N(2i+1)uπ?)cos(2N(2j+1)vπ?) 其中N=8N=8N=8,f(i,j)f(i,j)f(i,j)是原始像素矩陣元素,F(u,v)F(u,v)F(u,v)是變換后的系數矩陣元素。
量化:壓縮矩陣通過量化表(另一個矩陣)縮放DCT系數,丟棄高頻細節(人眼不敏感部分),實現數據壓縮。量化公式為: Q(u,v)=round(F(u,v)Qtable(u,v)) Q(u,v) = \text{round}\left(\frac{F(u,v)}{Q_{\text{table}}(u,v)}\right) Q(u,v)=round(Qtable?(u,v)F(u,v)?) 其中QtableQ_{\text{table}}Qtable?是預定義的量化矩陣。
編碼:量化后的矩陣通過熵編碼(如Huffman編碼)進一步壓縮為二進制流。
關系總結:圖像矩陣是壓縮的起點,壓縮算法生成新的“壓縮矩陣”(如DCT系數矩陣),最終輸出為壓縮文件。解壓時,逆過程重建近似原矩陣。
當然這一部分要求線代基礎知識,看不懂沒有關系,了解即可
三、全連接神經網絡的缺陷
全連接神經網絡(FCNN)在處理圖像時存在嚴重缺陷,主要源于其結構:
- 參數爆炸問題:在 FCNN 中,每個輸入節點(像素)都連接到隱藏層所有節點。設輸入大小為 nnn(如圖像展平為向量 x∈Rnx \in \mathbb{R}^nx∈Rn),隱藏層大小為 mmm,則權重矩陣 W∈Rm×nW \in \mathbb{R}^{m \times n}W∈Rm×n 的參數數量為 m×nm \times nm×n。對于 H×WH \times WH×W 的圖像,n=H×Wn = H \times Wn=H×W(灰度)或 n=H×W×Cn = H \times W \times Cn=H×W×C(彩色)。例如,1000×10001000 \times 10001000×1000 的 RGB 圖像輸入,n≈3×106n \approx 3 \times 10^6n≈3×106,若隱藏層 m=1000m=1000m=1000,參數量高達 3×1093 \times 10^93×109,導致訓練困難、內存不足。
- 計算效率低下:前向傳播的計算復雜度為 O(m×n)O(m \times n)O(m×n),在圖像任務中計算量巨大,難以實時處理。
- 缺乏局部性:FCNN 忽略圖像的空間結構。每個像素獨立處理,無法有效捕捉局部特征(如邊緣、紋理),因為相鄰像素在計算中不共享權重。
- 過擬合風險高:高參數量使模型容易過擬合小數據集,泛化能力差。
- 無平移不變性:圖像中物體位置變化(如貓在左或右)會導致輸出劇烈變化,因為權重與絕對位置綁定。
這些缺陷使 FCNN 不適合圖像任務,需要更高效的架構。
四、卷積神經網絡
為解決 FCNN 的缺陷,卷積神經網絡(CNN)被引入。它利用圖像的空間局部性和平移不變性:
- 卷積層:使用卷積核(filter)在圖像上滑動,計算局部區域的內積。設輸入圖像 X∈RH×W×CX \in \mathbb{R}^{H \times W \times C}X∈RH×W×C,卷積核 K∈RFh×Fw×C×DK \in \mathbb{R}^{F_h \times F_w \times C \times D}K∈RFh?×Fw?×C×D(Fh,FwF_h, F_wFh?,Fw? 為核大小,DDD 為輸出通道數),輸出特征圖 YYY 的元素為:
Y(i,j,d)=∑m=0Fh?1∑n=0Fw?1∑c=0C?1K(m,n,c,d)?X(i+m,j+n,c) Y(i,j,d) = \sum_{m=0}^{F_h-1} \sum_{n=0}^{F_w-1} \sum_{c=0}^{C-1} K(m,n,c,d) \cdot X(i+m,j+n,c) Y(i,j,d)=m=0∑Fh??1?n=0∑Fw??1?c=0∑C?1?K(m,n,c,d)?X(i+m,j+n,c)
這實現了權重共享和稀疏連接,大幅減少參數(如 3×33 \times 33×3 核僅需 9×C×D9 \times C \times D9×C×D 參數)。 - 優勢:
- 參數高效:卷積核在整張圖像共享權重,避免參數爆炸。
- 局部特征提取:捕捉邊緣、角點等局部模式。
- 平移不變性:物體位置變化不影響特征檢測。
- 層次結構:通過多層卷積和池化,逐步抽象特征(從低級紋理到高級語義)。
CNN 的典型結構包括卷積層、激活函數(如 ReLU)、池化層和全連接層。以下是一個簡單 CNN 的 PyTorch 實現示例:
import torch
import torch.nn as nnclass SimpleCNN(nn.Module):def __init__(self, num_classes=10):super(SimpleCNN, self).__init__()# 卷積層: 輸入通道3 (RGB), 輸出通道16, 核大小3x3self.conv1 = nn.Conv2d(3, 16, kernel_size=3, stride=1, padding=1)# 池化層: 2x2 最大池化self.pool = nn.MaxPool2d(kernel_size=2, stride=2)# 全連接層: 輸入尺寸基于圖像大小 (假設輸入32x32)self.fc = nn.Linear(16 * 16 * 16, num_classes) # 池化后尺寸減半: 32/2=16def forward(self, x):x = self.pool(torch.relu(self.conv1(x))) # 卷積 + ReLU + 池化x = x.view(x.size(0), -1) # 展平x = self.fc(x)return x# 示例用法
model = SimpleCNN()
input_image = torch.randn(1, 3, 32, 32) # 批大小1, 通道3, 高度32, 寬度32
output = model(input_image)
print(output.shape) # 輸出: torch.Size([1, 10])
此代碼展示了 CNN 如何高效處理圖像:卷積層提取特征,池化層降維,全連接層分類。CNN 已成為計算機視覺的基石,廣泛應用于圖像識別、目標檢測等任務。
總結一下:圖像在計算機中是矩陣方式進行存儲的,而CNN卷積神經網絡能夠高效處理圖像,下一節我們來詳細分析CNN的整體架構






:封裝自定義可復用組件)











:從原理到現代實現演進)
