目錄
一、發展歷程
二、軟件+硬件+算法深讀耦合?感知 - 決策 - 執行
1.機械系統:
2.驅動系統:
3.感知系統:
4.控制系統:
5.決策/智能系統:
6.電源系統:
7.總結
一、發展歷程
國際標準化組織(ISO)對機器人的定義是:機器人是一種能夠通過編程和自動控制來執行諸如作業或移動等任務的機器
第一代(遙控操作器):主要通過人工遙控操作,功能較為簡單,應用范圍有限
第二代(可編程機器人):能夠按照事先編好的程序自動重復完成某種操作,具有一定的自動化能力,廣泛應用于工業生產。
第三代(智能機器人):利用各種傳感器獲取環境信息,通過智能技術進識別、理解、推理并作出規劃決策,能夠自主行動實現預定目標。
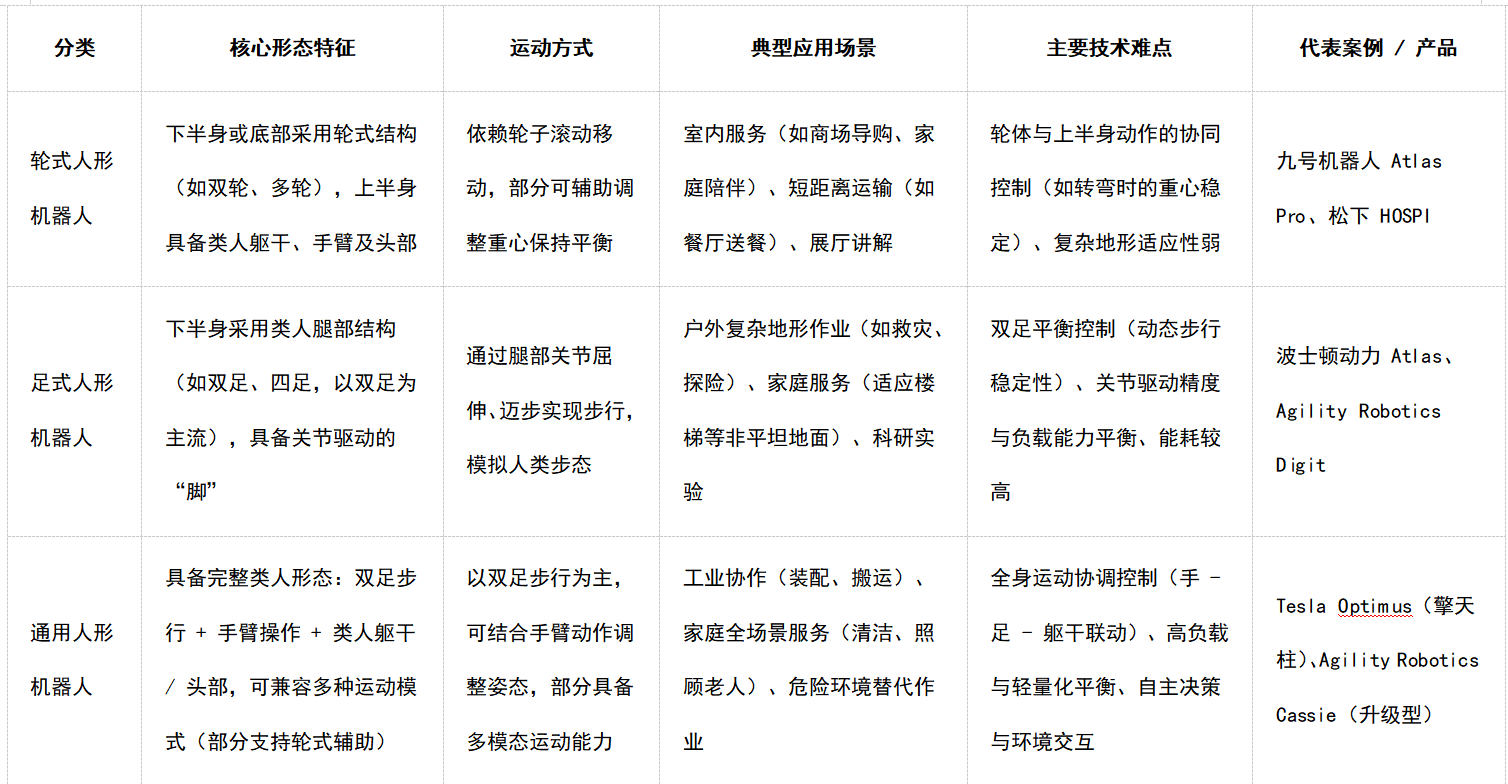
根據人形機器人的形態,可以將其分為輪式人形機器人、足式人形機器人、通用人形機器人。
二、軟件+硬件+算法深讀耦合?感知 - 決策 - 執行
機器人是由多個相互協作的系統組成的復雜整體。這些系統共同實現了機器人的感知、決策、執行和與環境交互的能力。主要可以歸納為以下幾個核心系統:
1.機械系統:
功能:構成機器人的物理結構,提供支撐、運動、操作和與環境交互的能力。
組成:
????????骨架/框架:支撐所有其他部件的基礎結構。
????????關節:允許部件之間相對運動的連接點(如旋轉關節、滑動關節)。
????????連桿/臂:連接關節并傳遞運動和力的剛性部件。
????????末端執行器:位于機器人肢體末端的工具或裝置,直接與環境或工作對象交互(如夾爪、焊槍、吸盤、噴槍、傳感器探頭等)。
????????移動平臺:對于移動機器人(如輪式、履帶式、腿式),提供整體移動能力。
2.驅動系統:
功能:提供動力,驅動機械系統的關節或輪子運動。
組成:
????????執行器:將能量(通常是電能或液壓/氣壓能)轉化為機械運動的裝置。
????????????????電機:最常用,包括直流電機、步進電機、伺服電機(精度高、帶反饋)。
????????????????液壓缸/液壓馬達:提供大力矩/力,常用于大型工業機器人或工程機械。
????????????????氣壓缸/氣壓馬達:結構簡單、成本低、響應快,但力量相對較小,精度較低。
????????傳動裝置:將執行器的運動和力傳遞到關節或輪子上,并可能改變速度、力矩或運動方向(如齒輪箱、皮帶、鏈條、滾珠絲杠、諧波減速器)。
3.感知系統:
功能:收集機器人自身狀態和周圍環境的信息,相當于機器人的“感官”。
組成:
????????內部傳感器:監測機器人自身狀態。
????????????????位置/角度傳感器(編碼器、電位器、旋轉變壓器)。
????????????????速度傳感器(測速發電機、編碼器)。
????????????????加速度傳感器(加速度計)。
????????????????力/力矩傳感器(安裝在關節或末端執行器)。
????????????????電流/電壓傳感器(監測驅動器狀態)。
????????外部傳感器:感知外部環境。
????????????????視覺傳感器(攝像頭:2D/3D、深度相機)。
????????????????距離傳感器(超聲波、紅外、激光雷達)。
????????????????觸覺傳感器(壓力、陣列)。
????????????????接近傳感器。
????????????????慣性測量單元(IMU:加速度計+陀螺儀,有時+磁力計)。
????????????????麥克風(聲音)。
????????????????氣體傳感器、溫度傳感器等(特定應用)。
????????????????GPS(室外定位)。
4.控制系統:
功能:機器人的“小腦和脊髓”。根據任務指令和傳感器反饋,計算并向驅動系統發送控制信號,精確控制機械系統的運動。負責底層運動控制(位置、速度、力控制)和協調。
組成:
????????控制器硬件:
????????????????微控制器:處理簡單任務。
????????????????微處理器:處理復雜計算。
????????????????數字信號處理器:高效處理傳感器信號(如圖像、聲音)。
????????????????可編程邏輯控制器:工業環境常用。
????????????????專用運動控制卡。
????????控制算法:
????????????????運動學計算(正/逆運動學)。
????????????????動力學計算(考慮力和慣性)。
????????????????路徑規劃(生成平滑軌跡)。
????????????????PID控制、自適應控制、阻抗控制、力控制等。
????????輸入/輸出接口:連接傳感器和執行器。
????????實時操作系統:確保控制循環的精確時序。
5.決策/智能系統:
功能:機器人的“大腦”。處理高級信息、理解環境、進行規劃、做出決策、學習適應。負責任務規劃、環境感知與理解(SLAM、物體識別)、導航、人機交互、學習等。
組成:
????????主處理器/計算單元:通常是更強大的CPU、GPU或AI加速芯片(如TPU),處理感知數據、運行復雜算法。
????????人工智能/機器學習算法:
????????????????計算機視覺(圖像識別、目標檢測、場景理解)。
????????????????自然語言處理(語音識別、語義理解)。
????????????????路徑規劃與導航算法(A,RRT,SLAM)。
????????????????任務與動作規劃。
????????????????機器學習模型(深度學習、強化學習)。
????????軟件框架與操作系統:如ROS、Linux等,提供開發、部署和運行軟件的底層支持。
6.電源系統:
功能:為所有其他系統提供所需的能量。
組成:
????????電源:
????????????????電池(鋰電池最常見,鉛酸、鎳氫等)。
????????????????外部電源(通過線纜供電)。
????????????????燃料電池、太陽能電池板(特定應用)。
????????電源管理單元:負責電壓轉換、穩壓、充放電管理、能源分配和優化,保護系統免受電源問題影響。
7.總結:
機械系統是機器人的“身體”。
驅動系統是機器人的“肌肉”。
感知系統是機器人的“感官”。
控制系統是機器人的“小腦和脊髓”(負責精確運動)。
決策/智能系統是機器人的“大腦”(負責思考、規劃和決策)。
電源系統是機器人的“心臟和血管”(提供能量)。
這些系統通過通信總線(如CAN總線、以太網、串口、無線通信)緊密連接,相互協作,使機器人能夠感知、思考、行動并完成任務。隨著技術的發展,各系統之間的界限有時會變得模糊(如集成傳感的控制單元),但這種功能劃分仍然是理解機器人構成的基本框架。








:從原理到現代實現演進)







中的應用探索)


