
什么是電機的極數和槽數?
【第7集】②?正弦波驅動的轉矩脈動、正弦電流的時序和相位變化、超前角控制(超前角調整)、正弦波驅動的各種波形 - 電源設計電子電路基礎電源技術信息網站_羅姆電源設計R課堂 (rohm.com.cn)
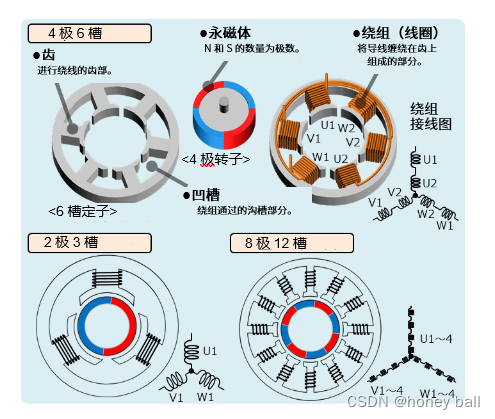
下面為您介紹表示電機特點的術語——極數和槽數以及相關的機械角度和電角度。
電機可用諸如“極數”、“槽數”這類數值來表示電機的特點。極數是指轉子的磁極數。嚴密地講,槽數是指下圖中“凹槽”的空間數量,但在集中繞組電機中,如圖所示,是在每個齒上分別纏繞一組線圈,因此其槽數與線圈數相同。順便提一下,雖然在下圖中沒有顯示,不過還有一種被稱為“分布繞組”的跨多個齒繞線的方式。
什么是電機的機械角度和電角度?
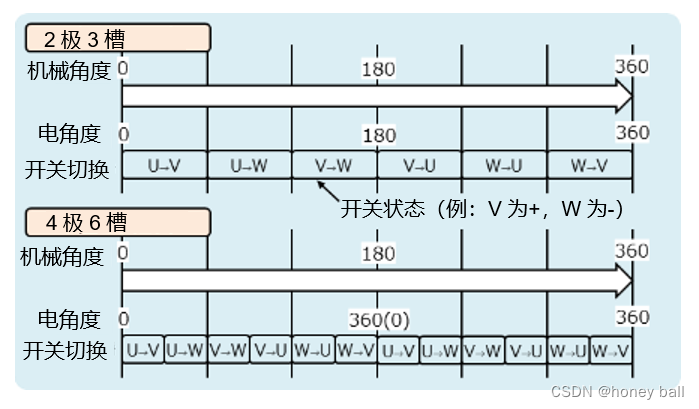
現在,由前述的極數差異而產生了機械角度和電角度(電周期)的概念。見文知意,“機械角度”就是電機旋轉一圈的空間幾何角度。轉子軸從某個位置開始旋轉并返回到原位置的角度是360度。而電角度則是將對繞組(線圈)施加電壓的開關的一個切換周期視為360度(后續會具體介紹)。
再稍微提一下,如果是2極3槽的電機,那么其機械角度和電角度是一致的(參見下圖)。而如果是4極6槽,則其機械角度是360度,其電角度是兩個周期(也可以表達為“當機械角度為180度時,電角度達到360度”,或者說“在一個電周期內轉子只轉半圈”)。
電機的轉速多用單位r/min表示(表示每分鐘旋轉了多少圈用rpm來表示,有時也寫作min-1。),另外,也用角度來表示轉子的位置和位置檢測器的位置,這些都是基于機械角度的表達。另一方面,電機驅動器輸出的電信號則是基于電角度的,因為電信號源于開關一個切換周期的反復。
無刷電機中的霍爾器件(霍爾IC):
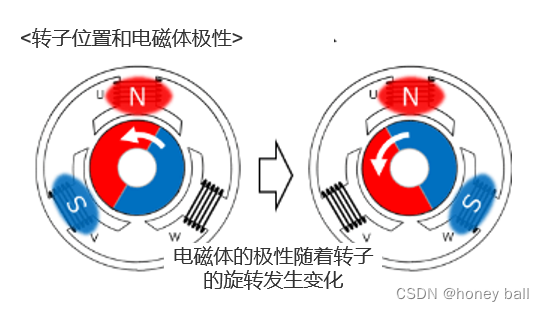
電機需要根據轉子的位置改變電磁體的磁極。在有刷電機中,由電刷和換向器擔負著這個作用,但在沒有電刷和換向器的無刷電機中,需要有能夠替代它們的功能。在這里,簡要介紹一下霍爾器件,它是檢測轉子位置的手段之一。
在電機中使用時,需要將霍爾器件安裝在電路板上可以檢測轉子磁極的位置。假設每60度電角度改變一次開關模式,那么按照電角度計算,需要以120度電角度間隔安裝總共3枚霍爾器件。如果每隔120度放置1枚霍爾器件,那么可以通過3枚器件的信號判定六個位置,也就是每60度的轉子位置
最近出現了不使用霍爾器件的驅動方法“無傳感器驅動”,還有使用1枚霍爾器件的方法,如AS5600,AS5048A,請大家找機會了解一下。
內轉子無刷:

外轉子電機:

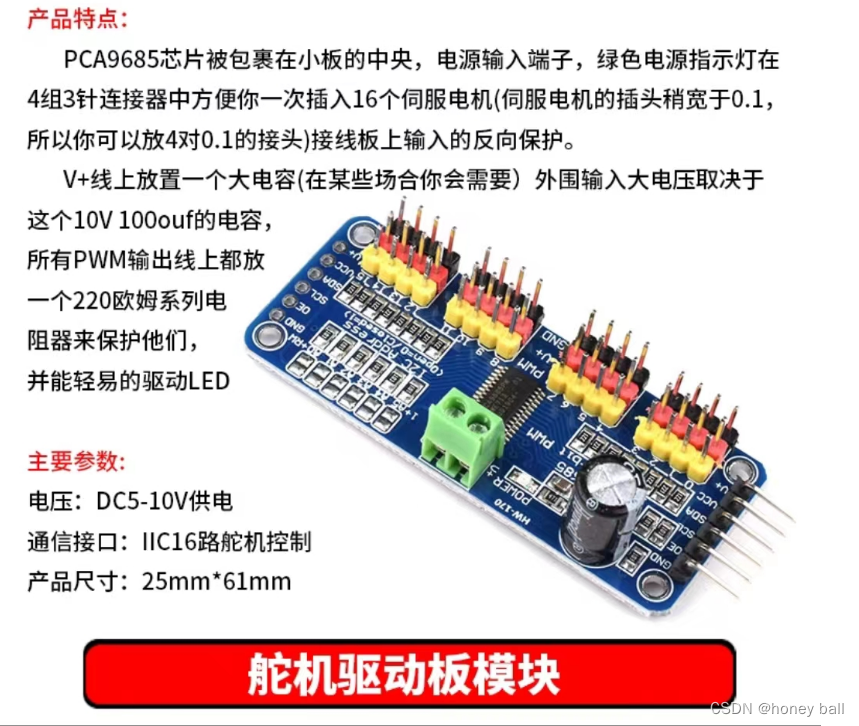
IIC多路PWM方案:

)
從入門到實戰【上】)




 的常見類)

2024.03.01:UCOSIII第三節 + 函數指針 (持續更新文件結構))

用法詳解)

)


)

DML)
