一.作業調度
作業調度算法需要知道以下公式
周轉時間=完成時間 - 到達時間
帶權周轉時間=周轉時間/運行時間
注:帶權周轉時間越大,作業(或進程)越短;帶權周轉時間越小,作業(或進程)越長。帶權周轉時間越小越好
平均周轉時間=作業周轉總時間/作業個數;
平均帶權周轉時間=帶權周轉總時間/作業個數
同時,作業調度算法會涉及一個概念:
饑餓:
作業饑餓(Job Starvation)或被餓死(Starvation)就是一個或多個低優先級的作業無法獲得系統資源,無法得到執行的機會,從而長時間處于等待狀態的情況。這種情況下,這些作業就會被餓死或者饑餓,因為它們無法得到所需的系統資源而無法完成執行。
?
看如下例子:
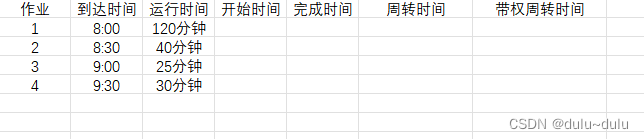
1.FCFS(先來先服務算法)
誰先到達,誰就先運行,所以作業運行順序為1->2->3->4

第一個作業完成后,第二個作業才能開始運行,所以第二個作業開始的時間是10:00

以此類推得到:
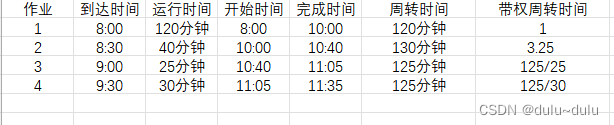
先來先服務算法的特點
先來先服務算法實現簡單,但是可以看到排在長作業后面的短作業需要等待很長時間,對短作業來說用戶體驗不好。
是否導致饑餓:此算法較為公平,不會導致饑餓
2.SJF(短作業優先調度算法)
誰的運行時間最短,誰就先運行
首先也從第一個開始,因為2,3,4都沒有到達
第一個的完成時間是10:00,這時候2,3,4都到達了,但是作業3的運行時間最短,所以接下來運行作業3

作業4的運行時間最短,所以接下來運行作業4,以此類推,最終的執行順序為:1->3->4->2
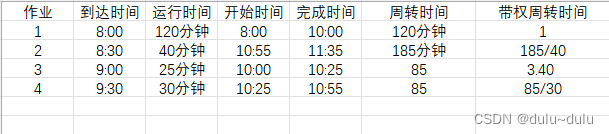
SJF算法的特點
短作業優先算法擁有“最短的”平均等待時間和平均周轉時間
是否導致饑餓:此算法會導致饑餓,如果有源源不斷的短作業進來,可能使長作業長時間得不到服務。如果一直得不到服務,則稱為“餓死”。
注:在實際情況下,作業的運行時間往往是由用戶提供的估計值,并不一定真實準確。這意味著在實際應用中,我們可能無法完全實現真正的短作業優先。
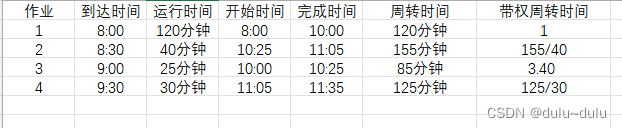
3.HRRF(高響應比優先算法)
(等待時間+運行時間)/運行時間
注:較高的響應比意味著作業等待時間相對較短,或者作業的服務時間相對較長,這可以確保作業盡快得到響應并完成。因此,響應比越高通常表示作業具有更好的調度優先級
從作業1開始:
若下一個執行的作業為作業2,那么響應比就是:(10:00-8:30)+40/40=13/4
若下一個執行的作業為作業3,那么響應比就是:(10:00-9:00)+25/25=85/25
若下一個執行的作業為作業4,那么響應比就是:(10:00-9:30)+30/30=2
因為85/25>13/4>2,下一個執行的作業是作業3

執行完后,要重新計算高響應比,響應比最高的運行,得到
若下一個執行的作業為作業2:(10:25-8:30)+40/40=155/40=3.875
若下一個執行的作業為作業4:(10:25-9:30)+30/30=85/30=2.8333...
所以下一個執行的作業為作業2,則最終執行的順序是:1->3->2->4
高響應比優先算法的特點
綜合考慮了等待時間和運行時間(要求服務時間)
等待時間相同時,要求服務時間短的優先(SJF 的優點)
要求服務時間相同時,等待時間長的優先(FCFS 的優點)
對于長作業來說,隨著等待時間越來越久,其響應比也會越來越大,從而避免了長作業饑餓的問題。
二.進程調度
以上的作業調度,我沒有提到進程二字,就是怕大家混淆起來,進程調度和作業調度是兩個不同的調度方法:
1、作業調度
作業調度又稱為高級調度,頻度較低。其主要工作是將位于外存后備隊列中的某個(或某幾個)作業調入內存,排在就緒隊列上。注意了,這個時候僅僅是將作業調入內存,并為作業創建進程、分配資源,此時進程處于就緒態,并沒有執行。
2、進程調度
進程調度又稱為低級調度,是最基本的、頻度最高的調度方式。其主要任務是從就緒隊列中選取一個(或幾個)進程,并分配處理機的過程,這時候才可以理解為“執行”。
3、區別
作業調度和進程調度最主要的區別在于,前者是為作業建立進程的過程,是將作業由外存調入內存的過程;而后者整個過程并沒有跑出內存的范圍,是將就緒態的進程變為運行態的過程。
進程調度也有饑餓的概念,同時進程調度中還有一個重要的概念:
搶占式/非搶占式:
搶占式調度:
?搶占式調度是指操作系統允許正在運行的進程被強制中斷,以便讓更高優先級的進程獲得CPU資源并開始運行。
?在搶占式調度中,操作系統會定期檢查所有正在運行的進程的優先級,并且如果有更高優先級的進程出現,操作系統會立即中斷當前進程的執行,將CPU資源分配給更高優先級的進程。
?例如,在搶占式調度中,當一個進程正在執行一個關鍵任務時,如果有更高優先級的進程需要運行,操作系統會立即中斷當前進程的執行,并將CPU資源分配給更高優先級的進程。非搶占式調度:
?非搶占式調度是指一旦一個進程獲得處理器,它就會一直運行直到完成或者自愿讓出CPU。
?在非搶占式調度中,高優先級的進程必須等待當前正在運行的進程結束或者主動讓出CPU后,才能獲得CPU資源并開始運行。
?例如,在非搶占式調度中,當一個進程正在執行一個關鍵任務時,其他高優先級的進程需要等待該進程完成或者主動讓出CPU,才能獲得CPU資源并開始執行。
正因為進程調度有這兩個性質,所以除了擁有作業調度的三種算法(FCFS,SJF,HRRF),還有其他常見的算法:
1.SRTF(最短剩余時間優先調度算法)
SRTF與SJF最大的區別就是其是搶占式的算法。
運行原理:每當有進程加入就緒隊列改變時就需要調度,如果新到達的進程剩余時間比當前運行的進程剩余時間更短,則由新進程搶占處理機,當前運行進程重新回到就緒隊列等待下一次調度。
2.RR(時間片輪轉調度算法)
算法思想:公平地、輪流地為各個進程服務,讓每個進程在一定時間間隔內都可以得到響應。
調度程序每次把CPU分配給就緒隊列首進程/線程使用一個時間間隔(稱為時間片),就緒隊列中的每個進程/線程輪流運行一個時間片。
算法規則:按照各進程到達就緒隊列的順序,輪流讓各個進程執行一個時間片(每次選擇的都是排在就緒隊列隊頭的進程)。若進程未在一個時間片內執行完,則剝奪處理機,將進程重新放到就緒隊列隊尾重新排隊。
時間片的選取:時間片大小的確定要從進程個數、切換開銷、系統效率和響應時間等方面考慮。
常用輪轉法:
① 最常用的輪轉法是等時間片輪轉法,每個進程輪流運行相同時間片。
② 改進的輪轉法對于不同的進程分配不同的時間片,時間片的長短可以動態修改。
是否搶占式:搶占式
是否會產生饑餓:不會
優點:公平,響應快,適用于分時操作系統。
缺點:由于高頻率的進程切換,因此有一定開銷;不區分任務的緊急性。
對于時間片輪轉調度算法的實現,建議觀看如下視頻:
RR時間片輪轉調度算法 ~相同到達時間_嗶哩嗶哩_bilibili
RR時間片輪轉調度算法~不同到達時間_嗶哩嗶哩_bilibili
時間片太大或太小
① 如果時間片太大,使得每個進程都可以在一個時間片內就完成,則時間片輪轉調度算法退化為先來先服務調度算法,并且會增大進程的響應時間。
② 如果時間片太小,進程調度、切換是有時間代價的,會導致進程切換過于頻繁,系統會花大量的時間來處理進程切換,從而導致實際用于進程執行的時間比例減小。
3.PSA(優先級調度算法)
算法思想:根據任務的緊急程度來決定處理順序。
算法規則:根據確定的優先級選取進程/線程,每次總是選擇就緒隊列中優先級最高者運行。
用戶進程/線程優先級的規定者有兩種:
① 用戶:用戶自己提出優先級,稱為外部指定法。優先級越高,費用越高。
② 系統:由系統綜合考慮有關因素來確定用戶進程/線程的優先級,稱為內部指定法。
進程/線程優先級的確定方式:
根據優先級是否隨時間而變,進程/線程優先級的確定有靜態和動態兩種方式:
① 靜態優先級:在進程/線程創建時確定,此后不再改變。優先級主要由進程類型、資源需求、時間需求和用戶需求決定。
優點:比較簡單,開銷小。
缺點:不夠公平不太靈活,可能出現優先級低的作業/進程長時間得不到調度的情況。
② 動態優先級:隨時間而變,基本原則是:
a. 正在運行的進程/線程隨著占有CPU時間的增加優先級逐漸降低;
b. 就緒隊列中等待CPU的進程/線程隨著等待時間增加優先級逐漸提高。
優點:公平性好,靈活,資源利用率高。
缺點:需要花費比較多的執行程序時間,因而花費的系統開銷比較大。
是否可搶占:搶占式,非搶占式都有。
是否導致饑餓:會
若源源不斷地有高優先級進程到來,則可能導致饑餓。
區別在于:非搶占式只需在進程主動放棄處理機時進行調度即可,而搶占式還需在就緒隊列變化時,檢查是否發生搶占。
優點:用優先級區分緊急程度、重要程度,適用于實時操作系統。可靈活地調整對各種作業/進程的偏好程度。
缺點:若源源不斷地有高優先級進程到來,則可能導致饑餓。
優先級調度算法:
速通操作系統優先級調度算法_嗶哩嗶哩_bilibili
4. MLFQ(多級反饋隊列調度算法)
算法思想:對其他調度算法的折中權衡。
算法規則:
1、建立多級就緒進程隊列,各級隊列優先級從高到低,時間片從小到大。每個隊列賦予不同優先級,較高優先級隊列一般分配給較短的時間片。
2、新進程到達時先進入第1級隊列,按先來先服務原則排隊等待被分配時間片,若用完時間片進程還未結束,則進程進入下一級隊列隊尾;若此時已經在最下級的隊列,則重新放回該隊列隊尾。
3、處理器調度每次先從高優先級就緒隊列中選取可占有處理器的進程,只有在選不到時,才從較低優先級就緒隊列中選取進程。即只有第k級隊列為空時,才會為k+1級隊頭的進程分配時間片。
4、任務可以根據自身的行為(如CPU使用時間、等待時間等)在不同的隊列之間移動,實現動態優先級的調整。
是否可搶占:搶占式
在k級隊列的進程運行過程中,若更上級的隊列(1~k-1級)中進入了一個新進程,則由于新進程處于優先級更高的隊列中,因此新進程會搶占處理機,原來運行的進程放回k級隊列隊尾。是否導致饑餓:會
優點:對其他調度算法的折中權衡。
對各類進程相對公平(FCFS的優點);
短進程只用較少的世界就可完成(SPF的優點);
每個新到達的進程都可以很快得到響應(RR的優點);
不必實現估計進程的運行時間(避免用戶作假);
可靈活地調整對各類進程的偏好程度,比如:CPU密集型進程、I/O密集型進程(拓展:可以將因I/O而阻塞的進程重新放回原隊列,這樣I/O型進程就可以保持較高優先級)。
缺點:可能會導致饑餓
多級反饋隊列調度算法
【進程管理】多級反饋隊列調度算法_嗶哩嗶哩_bilibili
![[git] 遠程刪除分支](http://pic.xiahunao.cn/[git] 遠程刪除分支)





)
)
——缺失值處理)



)



Echarts使用bmap.js實現軌跡動畫效果)
)

)