隨著機器人行業的快速發展,特別是四足仿生機器人在巡檢、探測、安防、救援等復雜環境中的廣泛部署,如何實現高質量、低延遲的遠程視頻監控與人機互動控制,已經成為制約其應用落地與規模化推廣的關鍵技術難題。
四足機器人常常面臨以下挑戰:
-
多場景適配需求:如廠區自動巡檢、野外勘探、狹窄空間探測等,對通信與控制系統要求極高;
-
實時性與安全性要求并重:遠程操控必須具備秒級以下的響應能力,否則將影響任務完成甚至造成安全風險;
-
弱網與高動態場景的適應能力:網絡條件波動頻繁,機器人必須具備在 4G/5G、Wi-Fi、專網等不同鏈路下穩定運行的能力。
針對這些行業痛點,近年來我們與國內某頭部四足機器人研發企業展開深度合作,圍繞機器人低延遲遠程控制、高清視頻回傳、多端實時互動等關鍵能力構建了一整套成熟可落地的技術鏈路。
該技術體系不僅滿足工業級可靠性需求,還兼顧靈活部署與可擴展性,現已在多個實戰場景中部署驗證。
本文將以典型應用場景為引導,從系統架構、協議選擇、端到端延遲控制策略等維度,深入解析四足機器人遠程視頻與控制系統的核心技術構建方式,
并重點介紹大牛直播SDK在這一體系中的角色與價值,幫助行業從業者更好地理解“視覺 + 控制 + 通信”融合系統的構建路徑。
一、行業應用場景剖析
1?? 遠程環境巡檢與智能巡邏
在工業園區、能源基地、變電站及無人化車間,四足機器人承擔著代替人工的日常巡檢任務。
通過搭載高性能攝像頭與傳感設備,機器人能夠將巡檢過程中的高清視頻與狀態信息實時回傳至監控中心,為運維人員提供第一手數據,實現對設備狀態、環境異常的遠程實時監控與預警,大幅提升巡檢效率與安全保障水平。
2?? 危險環境探測與應急響應
在災后搜救、化工泄漏、火災現場、狹窄復雜空間等高風險環境中,四足機器人憑借其出色的越障能力和穩定的視頻傳輸系統,成為人類進入危險區域前的“前哨”。依托高質量視頻回傳與低延遲控制鏈路,操作人員可在安全區域內遠程操控機器人進行探測、取證與初步干預,有效降低風險,提升應急響應效率。
3?? 一對一遠程操控與互動管理
對于需要精細化操控的應用場景,如遠程檢修、復雜地形跨越、特定任務執行,操控人員可通過專用控制終端與四足機器人建立一對一的低延遲專線連接。結合視頻回傳、控制指令下發與機器人狀態反饋,實現如臨現場般的實時互動,不僅保障操作的精準性,還能通過語音、數據等多通道融合,實現對機器人智能行為的深度遠程管理。
二、SmartMediakit核心技術優勢
作為專注于音視頻傳輸領域多年的專業 SDK,大牛直播SDK在四足機器人遠程視頻與控制場景下,提供了全鏈路、跨平臺的技術能力,全面支撐從視頻回傳到互動控制的應用需求。
1?? 超低延遲的 RTSP/RTMP 視頻鏈路
-
RTSP 協議支持
面向局域網、專網或專線環境,提供毫秒級低延遲(100~250ms)的實時視頻推流與播放能力,適用于工業巡檢、專網控制與本地監控系統。 -
RTMP 協議支持
面向公網、云端或廣域分發,實現秒級低延遲的視頻傳輸,便于與云平臺、遠程監控中心、直播系統無縫對接。 -
智能緩沖與丟包重傳機制
內置 Jitter Buffer 優化 與 丟包恢復 模塊,保證在弱網、波動網絡環境下的視頻播放流暢度與連貫性,極大提升系統的魯棒性與用戶體驗。
Android平臺Unity共享紋理模式RTMP播放延遲測試
2?? 實時互動與專線控制通道集成
-
專為一對一控制設計的專線連接能力
支持控制指令、視頻回傳、狀態反饋的全鏈路低延遲通信,確保遠程控制的操作及時性與穩定性。 -
可與定制控制協議深度集成
SDK 提供開放式接口,可無縫集成四足機器人的自研控制協議或專屬控制邏輯,實現通信、控制與媒體數據的一體化管理。
3?? 全平臺支持與易于集成的開發能力
-
多平臺 SDK 覆蓋
全面支持 Android、iOS、Windows、Linux、Unity3D,滿足多終端、多環境下的應用集成需求。 -
靈活嵌入與模塊化接入
可作為獨立視頻模塊集成至機器人控制 App、工業級控制臺或仿真環境,同時支持與主控系統、遠程管理系統的快速集成。 -
易于定制與二次開發
提供完整的 API 文檔與二次開發支持,滿足企業級定制需求,快速實現業務落地。
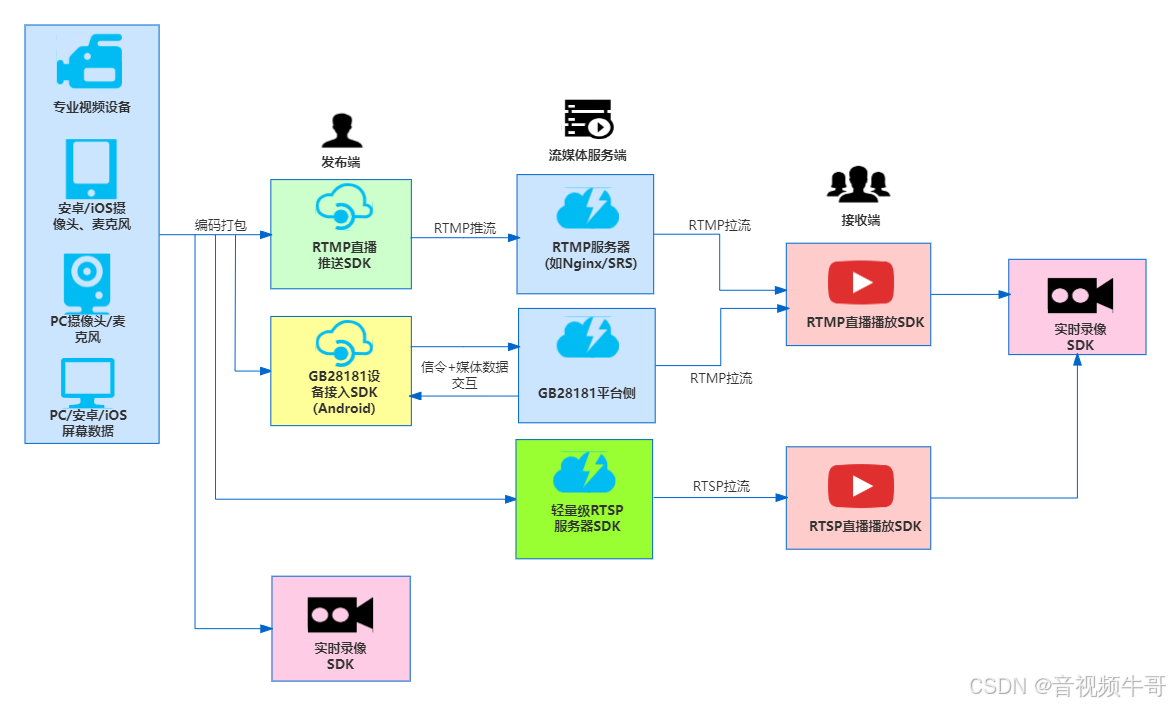
三、典型應用架構
在實際應用中,四足機器人的遠程視頻回傳與控制系統,通常采用**“機器人端 → 網絡傳輸 → 控制端”**的典型三層架構,結合大牛直播SDK,構建出高可靠、低延遲的業務鏈路。
[ 四足機器人 ] ? 實時 RTSP / RTMP 推流
[ 專網 / 公網 / 專線 ] ?
[ 控制終端 (App / Unity3D) ] ?
[ 大牛直播SDK:視頻播放 + 實時互動控制 ]1?? 機器人端 — 實時視頻推流與狀態采集
-
內置 RTSP/RTMP 推流模塊,支持開機即推、任務中斷恢復推流
-
支持高清視頻編碼(H.264/H.265),高碼率或低碼率可靈活切換
-
可配合機器人狀態采集模塊,實時上傳環境與傳感數據
2?? 傳輸鏈路 — 靈活的網絡適配
-
支持 專網、公網或專線傳輸
-
可部署邊緣中轉服務器,優化跨地域傳輸與訪問速度
-
弱網環境下配合 SDK 優化機制,保障傳輸質量與連接穩定
3?? 控制端 — 視頻回放與互動控制一體化
-
通過 大牛直播SDK 播放模塊 實現低延遲視頻接收與播放
-
集成 一對一互動控制模塊,保障控制命令的實時響應
-
支持多終端形態:
-
移動端 App(Android/iOS)
-
Unity3D 仿真與控制平臺
-
工業 PC 端專用控制軟件
-
4?? 可擴展的部署模式
-
點對點直連:控制端與機器人端通過專網或局域網直接通信,延遲更低
-
云端中轉部署:適合公網環境或多終端協同訪問,支持高并發、分布式管理
四、實戰效果與典型成果
通過與多家四足機器人企業的深度合作,我們基于大牛直播SDK構建的遠程視頻與控制解決方案,
已在多個真實項目場景中得到驗證,取得了良好的實戰效果:
? 智能環境巡檢項目
在工業園區與無人值守廠區的巡檢應用中,四足機器人搭載高清視頻采集模塊,結合 4G/5G 網絡,通過 RTSP 推流 + 大牛直播SDK 播放鏈路,實現視頻回傳延遲控制在 100~200ms 以內,保障了巡檢過程中的遠程操控穩定性與畫面實時性,有效提高了巡檢效率與安全管控水平。
? 高危環境探測與作業項目
在化工廠區、災后現場等危險環境部署中,結合機器人機載攝像頭與傳感系統,通過 RTMP 推流接入云端監控平臺,多終端實時查看回傳畫面,依托大牛SDK的丟包修復與網絡自適應機制,即便在 弱信號、波動網絡環境 下,仍能保障視頻流的穩定性與連續性,為遠程指揮與應急響應提供可靠支撐。
? 一對一低延遲互動控制項目
在需要高精度遠程操控的場景,通過專用控制終端與機器人建立 點對點低延遲專線通道,結合大牛直播SDK的實時視頻與互動控制接口,實現了毫秒級操控響應與同步的狀態反饋機制,操作者能夠精準操控機器人動作,同步感知環境變化與設備狀態,顯著提升了任務執行的安全性與操控體驗。
五、總結與展望
作為智能巡檢、環境探測與安防作業的重要載體,四足機器人對遠程視頻傳輸與操控系統的可靠性、實時性提出了更高要求。憑借 高兼容性、超低延遲傳輸能力 以及對多平臺的全面支持,
大牛直播SDK 已在多個實際應用項目中,為四足機器人提供了穩定、靈活的遠程視頻與控制技術支撐,幫助合作伙伴實現了從本地操控到跨地域遠程管理的應用突破。
未來,我們將繼續與行業領先的機器人研發企業緊密協作,圍繞低延遲互動、遠程智能控制、云端實時視頻管理等領域不斷創新,共同推動四足機器人在工業巡檢、應急救援與特種作業等高價值場景下的應用邊界,為智能機器人行業的發展注入更強技術動力。
用邊界。
👉 深入了解
官方博客:CDDN官方博客-大牛直播SDK




)







(二))


:樹與二叉樹基礎 + 堆結構全解析)
)
)

