競爭與協作
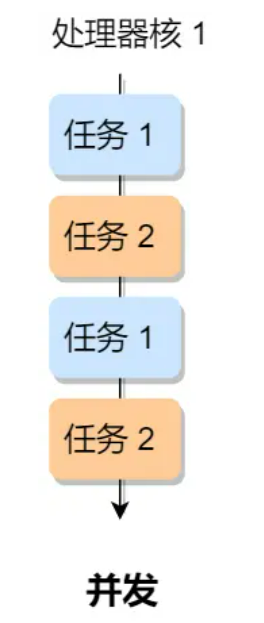
在單核 CPU 系統里,為了實現多個程序同時運行的假象,操作系統通常以時間片調度的方式,讓每個進程執行每次執行一個時間片,時間片用完了,就切換下一個進程運行,由于這個時間片的時間很短,于是就造成了「并發」的現象。
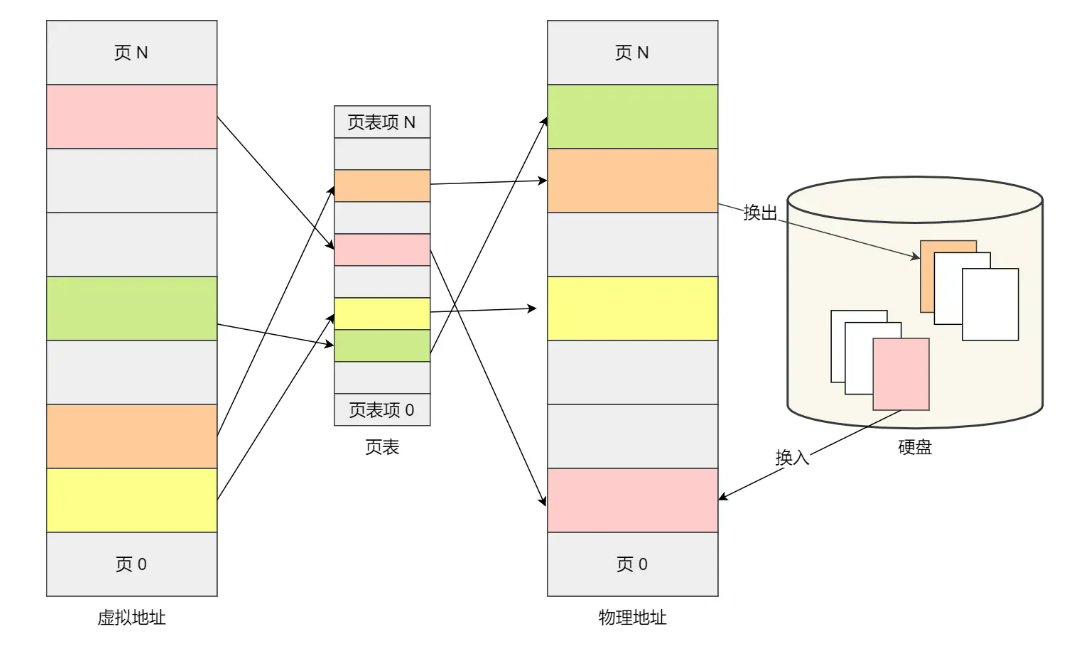
另外,操作系統也為每個進程創建巨大、私有的虛擬內存的假象,這種地址空間的抽象讓每個程序好像擁有自己的內存,而實際上操作系統在背后秘密地讓多個地址空間「復用」物理內存或者磁盤。
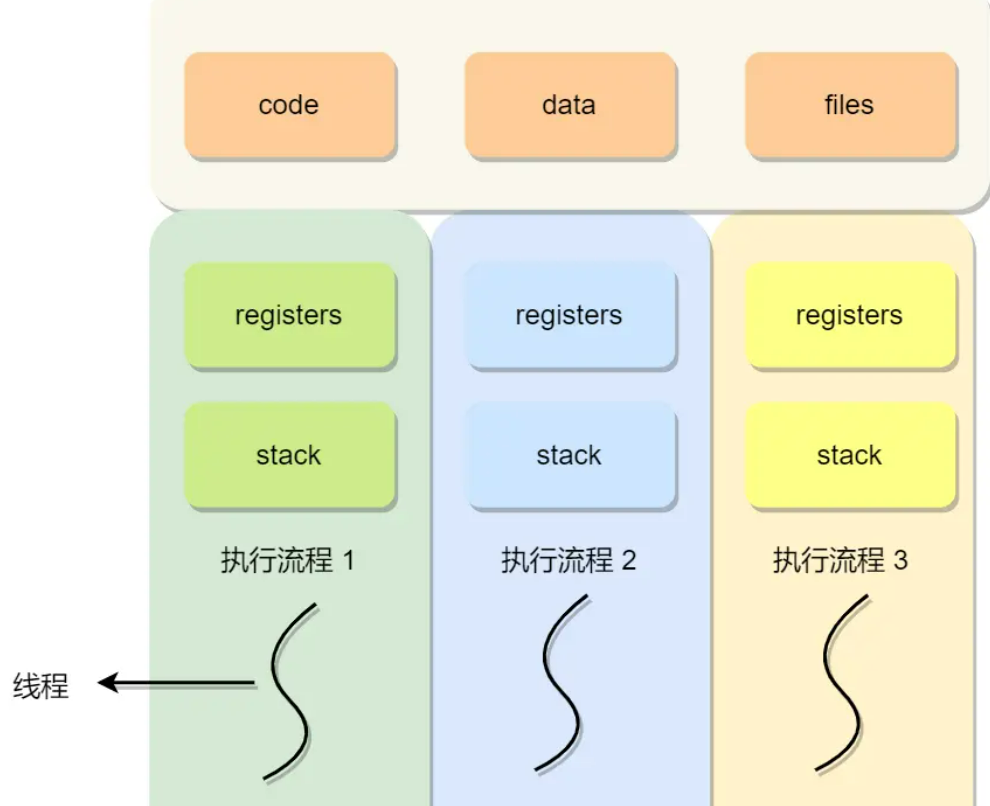
如果一個程序只有一個執行流程,也代表它是單線程的。當然一個程序可以有多個執行流程,也就是所謂的多線程程序,線程是調度的基本單位,進程則是資源分配的基本單位。
所以,線程之間是可以共享進程的資源,比如代碼段、堆空間、數據段、打開的文件等資源,但每個線程都有自己獨立的棧空間。
那么問題就來了,多個線程如果競爭共享資源,如果不采取有效的措施,則會造成共享數據的混亂。
假設現在創建了2個線程,要對i=i+1循環一千次,會出現什么結果?
假設 i == 100
線程 A 讀取 i = 100
線程 B 讀取 i = 100
A 執行
i + 1得到 101,準備寫入B 執行
i + 1也得到 101,準備寫入A 寫入 i = 101
B 也寫入 i = 101(把 A 的寫入覆蓋了)
本應 i = 102,但只加了 1,加1“丟失”了。
互斥的概念
上面展示的情況稱為競爭條件(race condition),當多線程相互競爭操作共享變量時,由于運氣不好,即在執行過程中發生了上下文切換,我們得到了錯誤的結果,事實上,每次運行都可能得到不同的結果,因此輸出的結果存在不確定性(indeterminate)。
由于多線程執行操作共享變量的這段代碼可能會導致競爭狀態,因此我們將此段代碼稱為臨界區(criticalsection),它是訪問共享資源的代碼片段,一定不能給多線程同時執行。
我們希望這段代碼是互斥(mutualexclusion)的,也就說保證一個線程在臨界區執行時,其他線程應該被阻止進入臨界區,說白了,就是這段代碼執行過程中,最多只能出現一個線程。
另外,說一下互斥也并不是只針對多線程。在多進程競爭共享資源的時候,也同樣是可以使用互斥的方式來避免資源競爭造成的資源混亂。
同步的概念
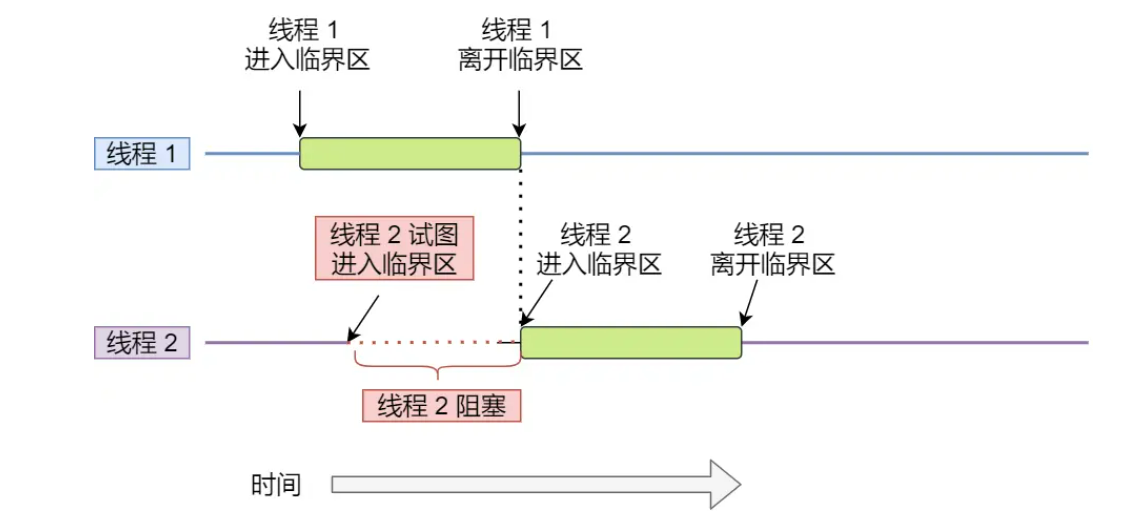
互斥解決了并發進程/線程對臨界區的使用問題。這種基于臨界區控制的交互作用是比較簡單的,只要一個進程/線程進入了臨界區,其他試圖想進入臨界區的進程/線程都會被阻塞著,直到第一個進程/線程離開了臨界區。
我們都知道在多線程里,每個線程并不一定是順序執行的,它們基本是以各自獨立的、不可預知的速度向前推進,但有時候我們又希望多個線程能密切合作,以實現一個共同的任務。
例子,線程 1 是負責讀入數據的,而線程 2 是負責處理數據的,這兩個線程是相互合作、相互依賴的。線程 2 在沒有收到線程 1 的喚醒通知時,就會一直阻塞等待,當線程 1 讀完數據需要把數據傳給線程 2時,線程 1 會喚醒線程 2,并把數據交給線程 2 處理。
所謂同步,就是并發進程/線程在一些關鍵點上可能需要互相等待與互通消息,這種相互制約的等待與互通信息稱為進程/線程同步。
互斥與同步的實現和使用
為了實現進程/線程間正確的協作,操作系統必須提供實現進程協作的措施和方法,主要的方法有兩種:
- 鎖:加鎖、解鎖操作;
- 信號量:P、V 操作;
這兩個都可以方便地實現進程/線程互斥,而信號量比鎖的功能更強一些,它還可以方便地實現進程/線程同步。
鎖
使用加鎖操作和解鎖操作可以解決并發線程/進程的互斥問題。
任何想進入臨界區的線程,必須先執行加鎖操作。若加鎖操作順利通過,則線程可進入臨界區;在完成對臨界資源的訪問后再執行解鎖操作,以釋放該臨界資源。
根據鎖的實現不同,可以分為「忙等待鎖」和「無忙等待鎖」。
忙等待鎖
在說明「忙等待鎖」的實現之前,先介紹現代 CPU 體系結構提供的特殊原子操作指令?—— 測試和置位(Test-and-Set)指令。
如果用 C 代碼表示 Test-and-Set 指令,形式如下:
int TestAndSet(int *old_ptr,int new){int old=*old_ptr;*old_ptr=new;return old;
}
測試并設置指令做了下述事情:
int *old_ptr:指向某個共享變量(通常是鎖變量)int new:你想設置的新值(例如 1,表示“加鎖”)
當然,關鍵是這些代碼是原子執行。因為既可以測試舊值,又可以設置新值,所以我們把這條指令叫作「測試并設置」。
那什么是原子操作呢?原子操作就是要么全部執行,要么都不執行,不能出現執行到一半的中間狀態我們可以運用 Test-and-Set 指令來實現「忙等待鎖」,代碼如下:
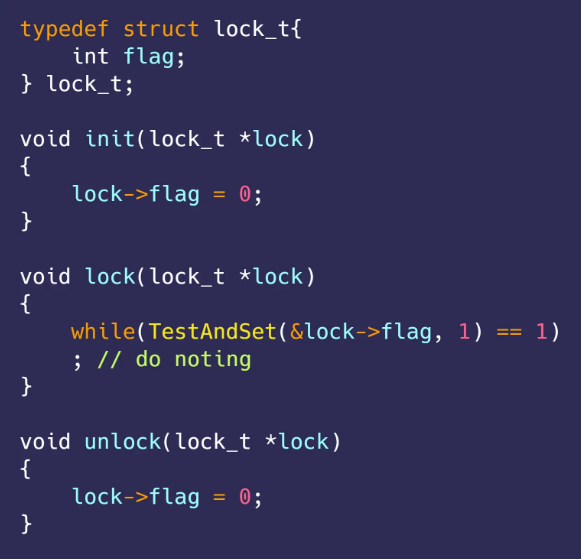
我們來確保理解為什么這個鎖能工作:
- 第一個場景是,首先假設一個線程在運行,調用?
lock(),沒有其他線程持有鎖,所以?flag?是 0。沒有其他線程持有鎖,所以?flag?是 0。沒有其他線程持有鎖,所以?flag?是 0。同時也會原子的設置flag 為1,標志鎖已經被持有。當線程離開臨界區,調用?unlock()?將?flag?清理為 0。 - 第二種場景是,當某一個線程已經持有鎖(即?
flag?為1)。本線程調用?lock(),然后調用TestAndSet(flag, 1),這一次返回 1。只要另一個線程一直持有鎖,TestAndSet()?會重復返回 1,本線程會一直忙等。當?flag?終于被改為 0,本線程會調用?TestAndSet(),返回 0 并且原子地設置為 1,從而獲得鎖,進入臨界區。
很明顯,當獲取不到鎖時,線程就會一直 while 循環,不做任何事情,所以就被稱為「忙等待鎖」,也被稱為自旋鎖(spin lock)。
這是最簡單的一種鎖,一直自旋,利用 CPU 周期,直到鎖可用。在單處理器上,需要搶占式的調度器(即不斷通過時鐘中斷一個線程,運行其他線程)。否則,自旋鎖在單 CPU 上無法使用,因為一個自旋的線程永遠不會放棄 CPU。
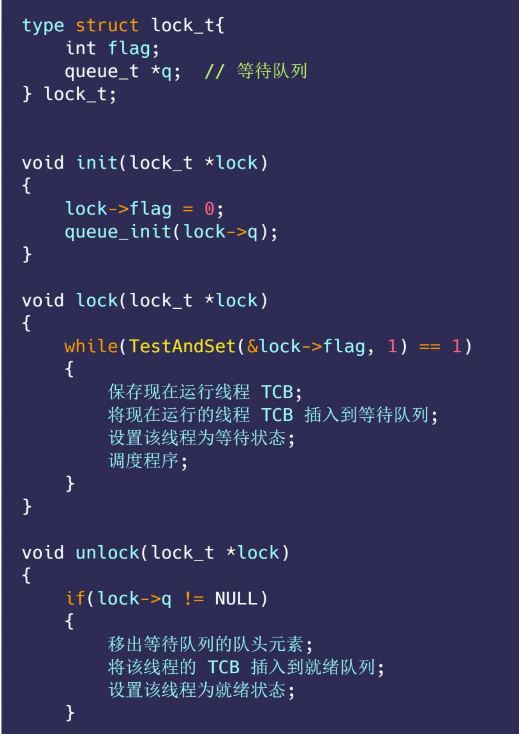
無等待鎖
無等待鎖顧明思議就是獲取不到鎖的時候,不用自旋。
既然不想自旋,那當沒獲取到鎖的時候,就把當前線程放入到鎖的等待隊列,然后執行調度程序,把 CPU讓給其他線程執行。
信號量
信號量是操作系統提供的一種協調共享資源訪問的方法。
通常信號量表示資源的數量,對應的變量是一個整型(sem)變量。
另外,還有兩個原子操作的系統調用函數來控制信號量的,分別是:
- P 操作:將?
sem?減?1,相減后,如果?sem < 0,則進程/線程進入阻塞等待,否則繼續,表明 P 操作可能會阻塞; - V 操作:將?
sem?加?1,相加后,如果?sem <= 0,喚醒一個等待中的進程/線程,表明 V 操作不會阻塞;
P 操作是用在進入臨界區之前,V 操作是用在離開臨界區之后,這兩個操作是必須成對出現的。
PV 操作的函數是由操作系統管理和實現的,所以操作系統已經使得執行 PV 函數時是具有原子性的。
PV 操作如何使用的呢
我們先來說說如何使用信號量實現臨界區的互斥訪問。
為每類共享資源設置一個信號量?s,其初值為?1,表示該臨界資源未被占用。
任何想進入臨界區的線程,必先在互斥信號量上執行 P 操作,在完成對臨界資源的訪問后再執行 V操作。由于互斥信號量的初始值為 1,故在第一個線程執行 P 操作后 s 值變為 0,表示臨界資源為空閑,可分配給該線程,使之進入臨界區。
若此時又有第二個線程想進入臨界區,也應先執行 P 操作,結果使 s 變為負值,這就意味著臨界資源已被占用,因此,第二個線程被阻塞。
并且,直到第一個線程執行 V 操作,釋放臨界資源而恢復 s 值為 0 后,才喚醒第二個線程,使之進入臨界區,待它完成臨界資源的訪問后,又執行 V 操作,使 s 恢復到初始值 1。
對于兩個并發線程,互斥信號量的值僅取 1、0 和 -1 三個值,分別表示:
- 如果互斥信號量為 1,表示沒有線程進入臨界區;
- 如果互斥信號量為 0,表示有一個線程進入臨界區;
- 如果互斥信號量為 -1,表示一個線程進入臨界區,另一個線程等待進入。
通過互斥信號量的方式,就能保證臨界區任何時刻只有一個線程在執行,就達到了互斥的效果。
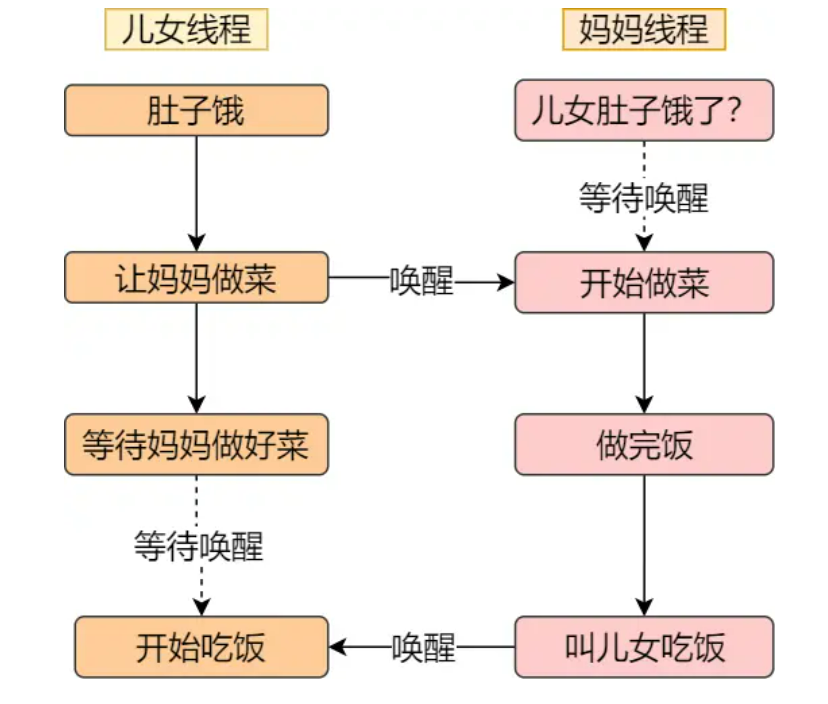
再來,我們說說如何使用信號量實現事件同步。
同步的方式是設置一個信號量,其初值為?0。
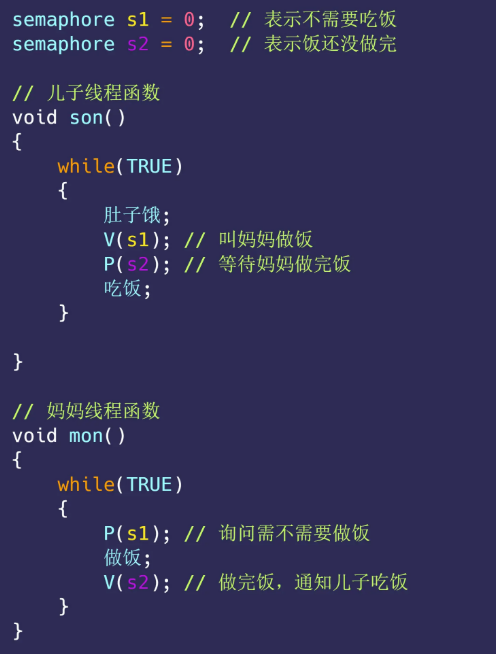
媽媽一開始詢問兒子要不要做飯時,執行的是?P(s1)?,相當于詢問兒子需不需要吃飯,由于?s1?初始值為 0,此時?s1?變成 -1,表明兒子不需要吃飯,所以媽媽線程就進入等待狀態。
當兒子肚子餓時,執行了?V(s1),使得?s1?信號量從 -1 變成 0,表明此時兒子需要吃飯了,于是就喚醒了阻塞中的媽媽線程,媽媽線程就開始做飯。
接著,兒子線程執行了?P(s2),相當于詢問媽媽飯做完了嗎,由于?s2?初始值是 0,則此時?s2?變成-1,說明媽媽還沒做完飯,兒子線程就等待狀態。最后,媽媽終于做完飯了,于是執行?V(s2),s2?信號量從 -1 變回了 0,于是就喚醒等待中的兒子線程,喚醒后,兒子線程就可以進行吃飯了。
生產者-消費者問題

生產者-消費者問題描述:
- 生產者在生成數據后,放在一個緩沖區中;
- 消費者從緩沖區取出數據處理;
- 任何時刻,只能有一個生產者或消費者可以訪問緩沖區;
我們對問題分析可以得出:
- 任何時刻只能有一個線程操作緩沖區,說明操作緩沖區是臨界代碼,需要互斥;
- 緩沖區空時,消費者必須等待生產者生成數據;緩沖區滿時,生產者必須等待消費者取出數據。說明生產者和消費者需要同步。
那么我們需要三個信號量,分別是:
- 互斥信號量?
mutex:用于互斥訪問緩沖區,初始化值為 1; - 資源信號量?
fullBuffers:用于消費者詢問緩沖區是否有數據,有數據則讀取數據,初始化值為 0(表明緩沖區一開始為空); - 資源信號量?
emptyBuffers:用于生產者詢問緩沖區是否有空位,有空位則生成數據,初始化值為 n(緩沖區大小);
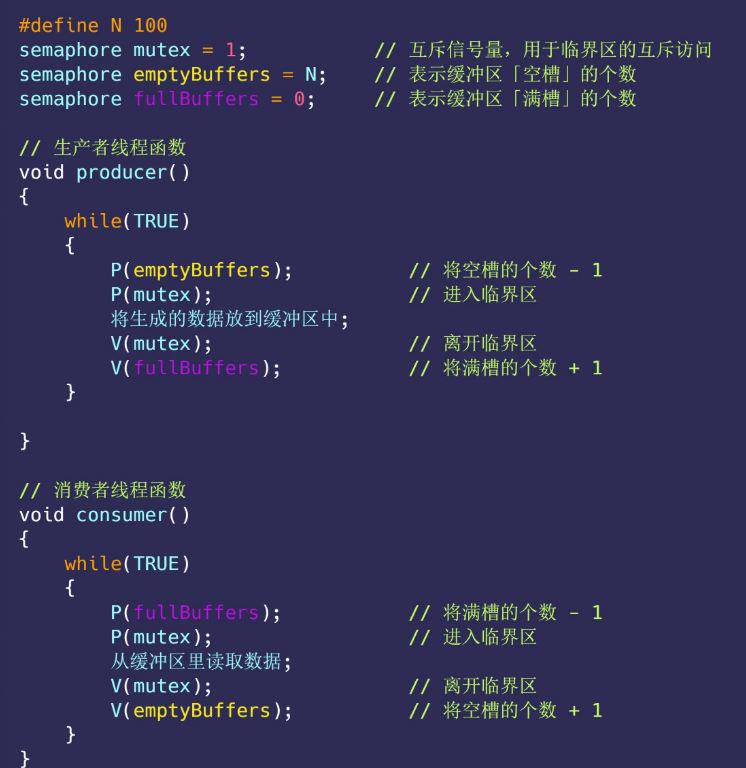
如果消費者線程一開始執行?P(fullBuffers),由于信號量?fullBuffers?初始值為 0,則此時fullBuffers?的值從 0 變為 -1,說明緩沖區里沒有數據,消費者只能等待。
接著,輪到生產者執行?P(emptyBuffers),表示減少 1 個空槽,如果當前沒有其他生產者線程在臨界區執行代碼,那么該生產者線程就可以把數據放到緩沖區,放完后,執行?V(fullBuffers)?,信號量fullBuffers?從 -1 變成 0,表明有「消費者」線程正在阻塞等待數據,于是阻塞等待的消費者線程會被喚醒。
消費者線程被喚醒后,如果此時沒有其他消費者線程在讀數據,那么就可以直接進入臨界區,從緩沖區讀取數據。最后,離開臨界區后,把空槽的個數 + 1。
經典同步問題
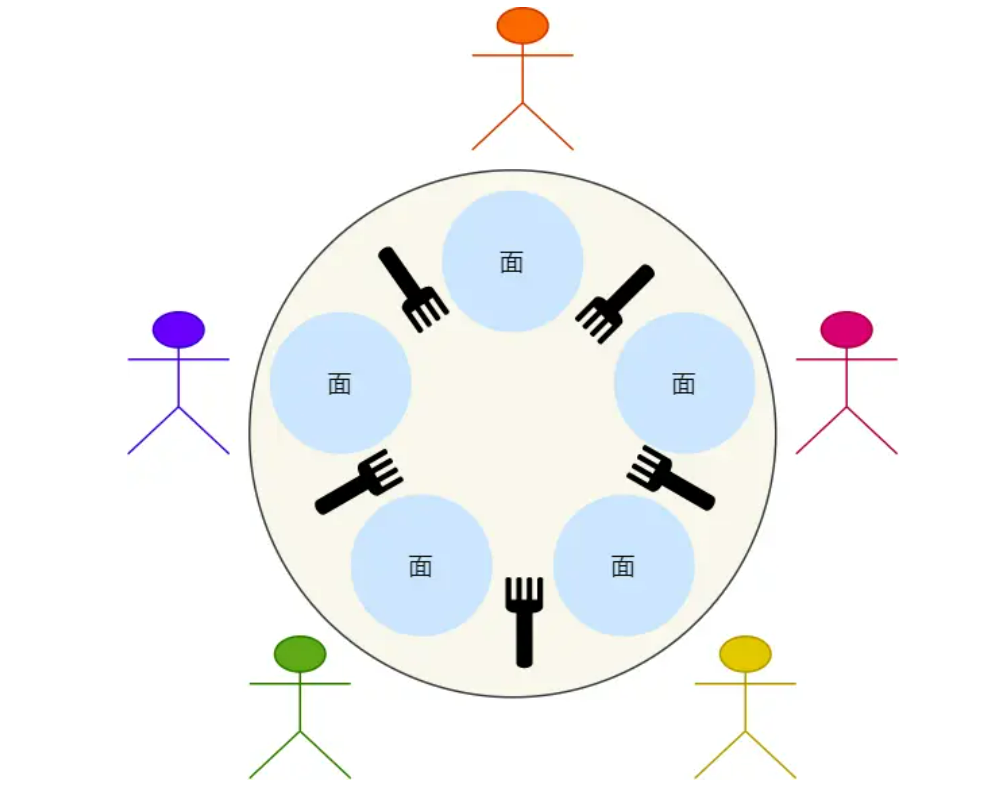
先來看看哲學家就餐的問題描述:
5?個老大哥哲學家,閑著沒事做,圍繞著一張圓桌吃面;- 巧就巧在,這個桌子只有?
5?支叉子,每兩個哲學家之間放一支叉子; - 哲學家圍在一起先思考,思考中途餓了就會想進餐;
- 奇葩的是,這些哲學家要兩支叉子才愿意吃面,也就是需要拿到左右兩邊的叉子才進餐;
- 吃完后,會把兩支叉子放回原處,繼續思考;
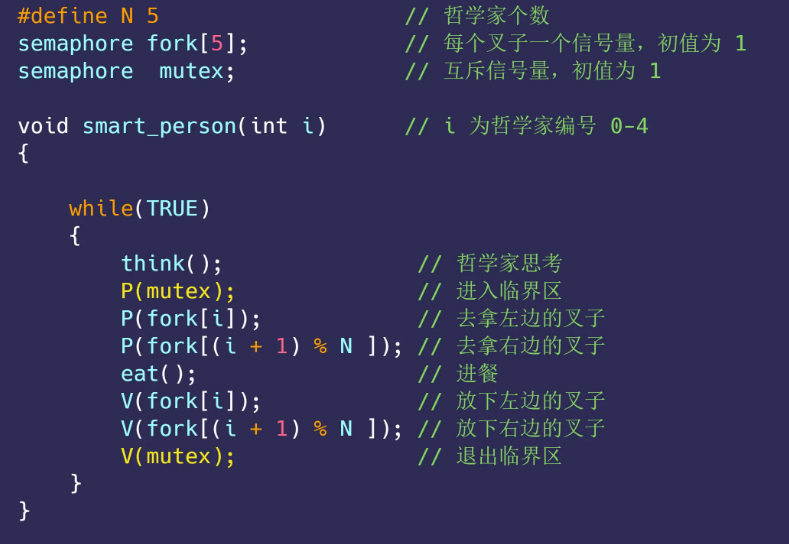
方案一
我們用信號量的方式,也就是 PV 操作來嘗試解決它,代碼如下: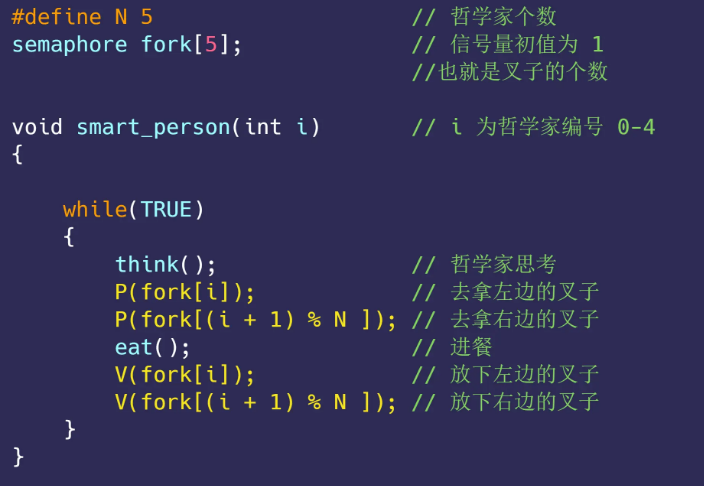
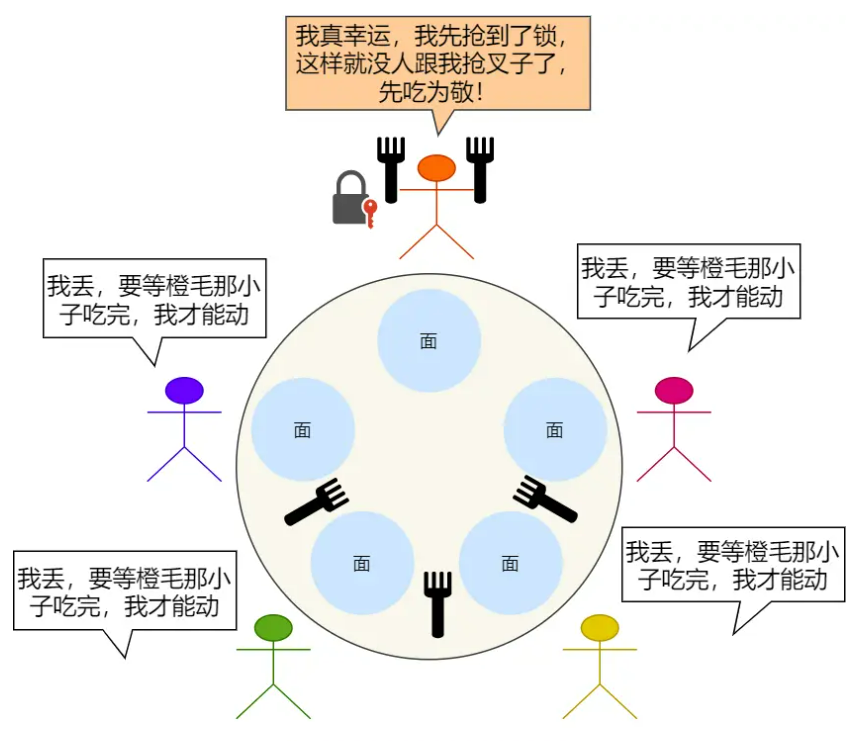
上面的程序,好似很自然。拿起叉子用 P 操作,代表有叉子就直接用,沒有叉子時就等待其他哲學家放回叉子。
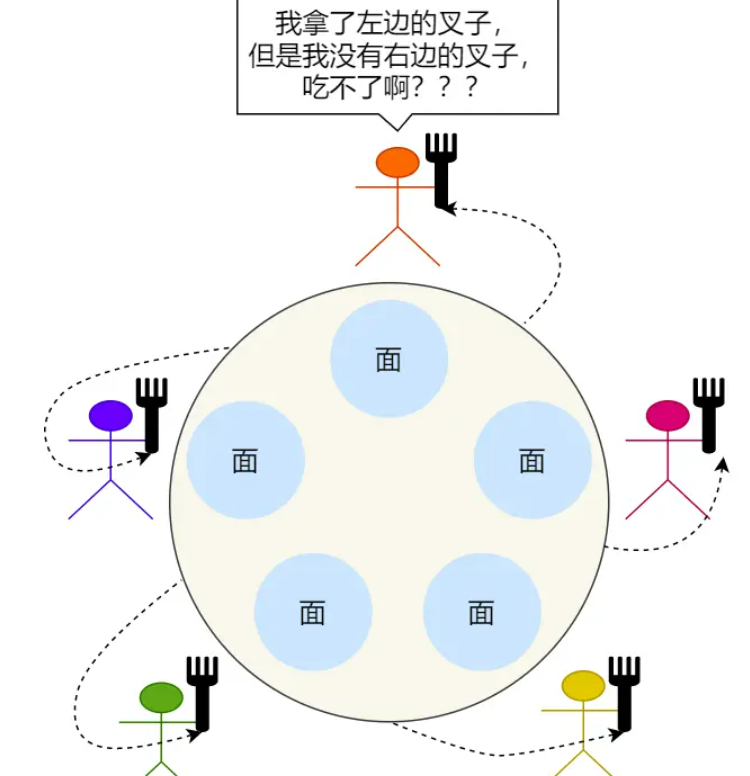
不過,這種解法存在一個極端的問題:假設五位哲學家同時拿起左邊的叉子,桌面上就沒有叉子了, 這樣就沒有人能夠拿到他們右邊的叉子,也就說每一位哲學家都會在?P(fork[(i + 1) % N ])?這條語句阻塞了,很明顯這發生了死鎖的現象。
方案二
既然「方案一」會發生同時競爭左邊叉子導致死鎖的現象,那么我們就在拿叉子前,加個互斥信號量,代碼如下:
上面程序中的互斥信號量的作用就在于,只要有一個哲學家進入了「臨界區」,也就是準備要拿叉子時,其他哲學家都不能動,只有這位哲學家用完叉子了,才能輪到下一個哲學家進餐。
方案二雖然能讓哲學家們按順序吃飯,但是每次進餐只能有一位哲學家,而桌面上是有 5 把叉子,按道理是能可以有兩個哲學家同時進餐的,所以從效率角度上,這不是最好的解決方案。
方案三
那既然方案二使用互斥信號量,會導致只能允許一個哲學家就餐,那么我們就不用它。
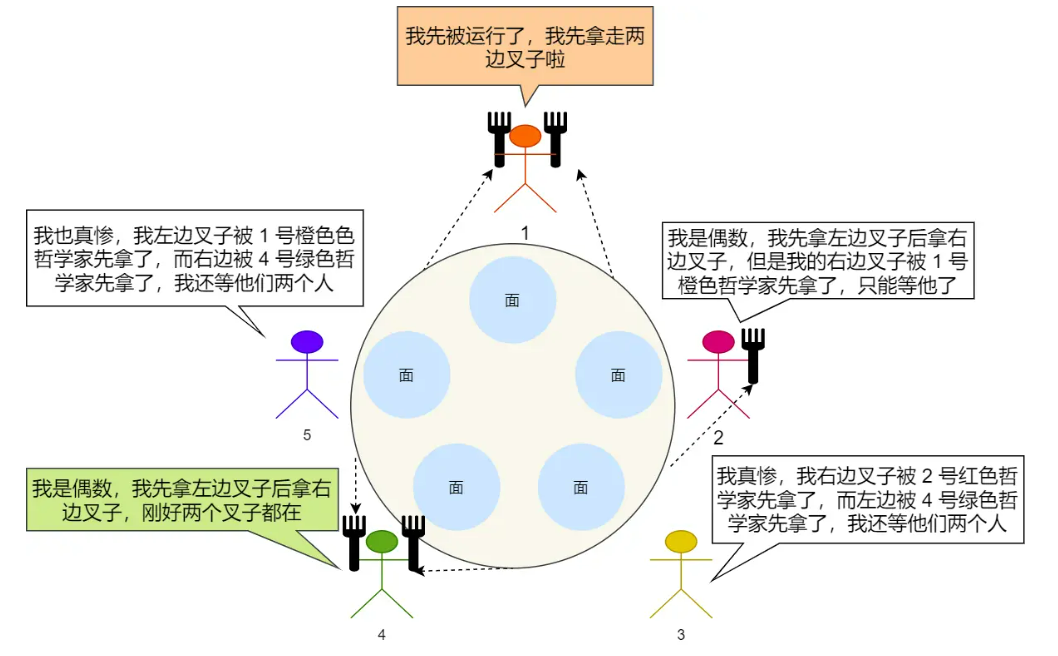
另外,方案一的問題在于,會出現所有哲學家同時拿左邊刀叉的可能性,那我們就避免哲學家可以同時拿左邊的刀叉,采用分支結構,根據哲學家的編號的不同,而采取不同的動作。
即讓偶數編號的哲學家「先拿左邊的叉子后拿右邊的叉子」,奇數編號的哲學家「先拿右邊的叉子后拿左邊的叉子」。
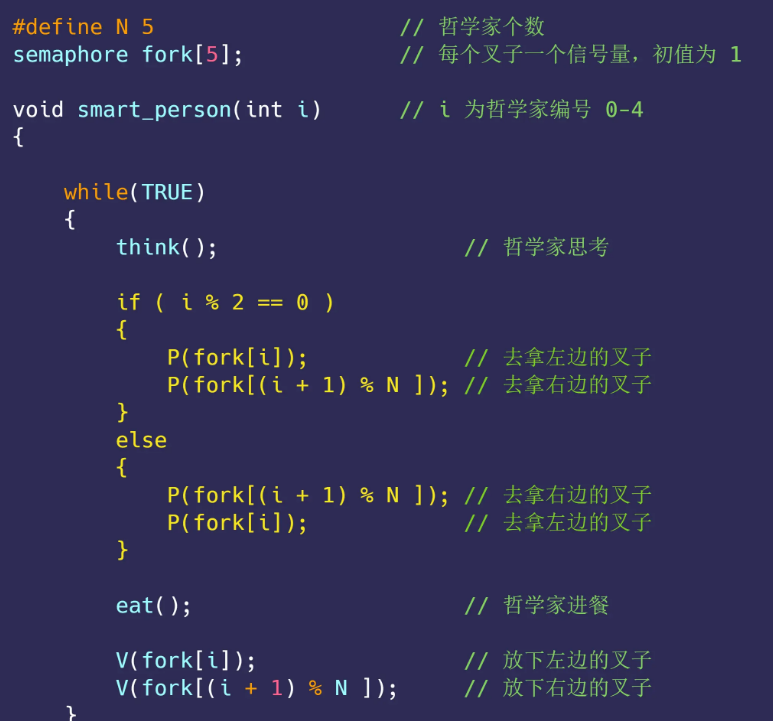
上面的程序,在 P 操作時,根據哲學家的編號不同,拿起左右兩邊叉子的順序不同。另外,V 操作是不需要分支的,因為 V 操作是不會阻塞的。
方案四
在這里再提出另外一種可行的解決方案,我們用一個數組 state 來記錄每一位哲學家的三個狀態,分別是在進餐狀態、思考狀態、饑餓狀態(正在試圖拿叉子)。
那么,一個哲學家只有在兩個鄰居都沒有進餐時,才可以進入進餐狀態。
第?i?個哲學家的左鄰右舍,則由宏?LEFT?和?RIGHT?定義:
- LEFT?: ( i + 5 - 1 ) % 5
- RIGHT?: ( i + 1 ) % 5
具體代碼實現如下:
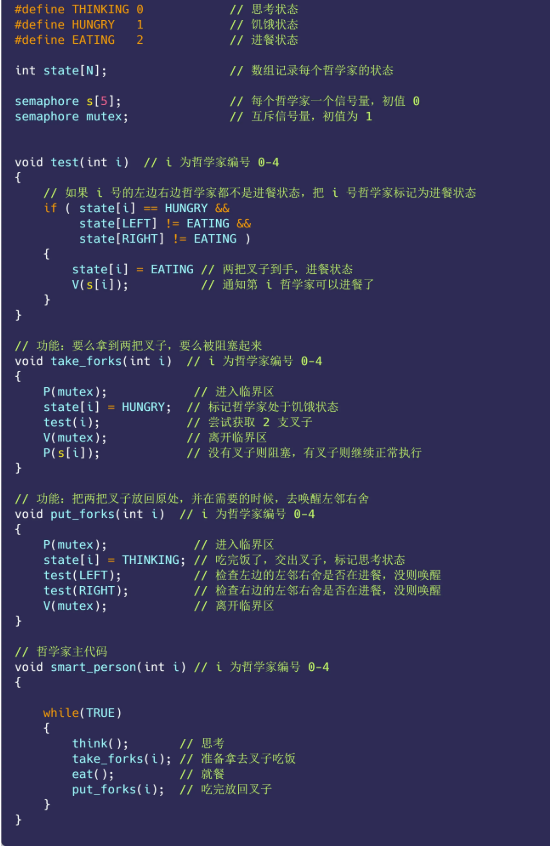
上面的程序使用了一個信號量數組,每個信號量對應一位哲學家,這樣在所需的叉子被占用時,想進餐的哲學家就被阻塞。
注意,每個進程/線程將?smart_person?函數作為主代碼運行,而其他?take_forks、put_forks?和test?只是普通的函數,而非單獨的進程/線程。
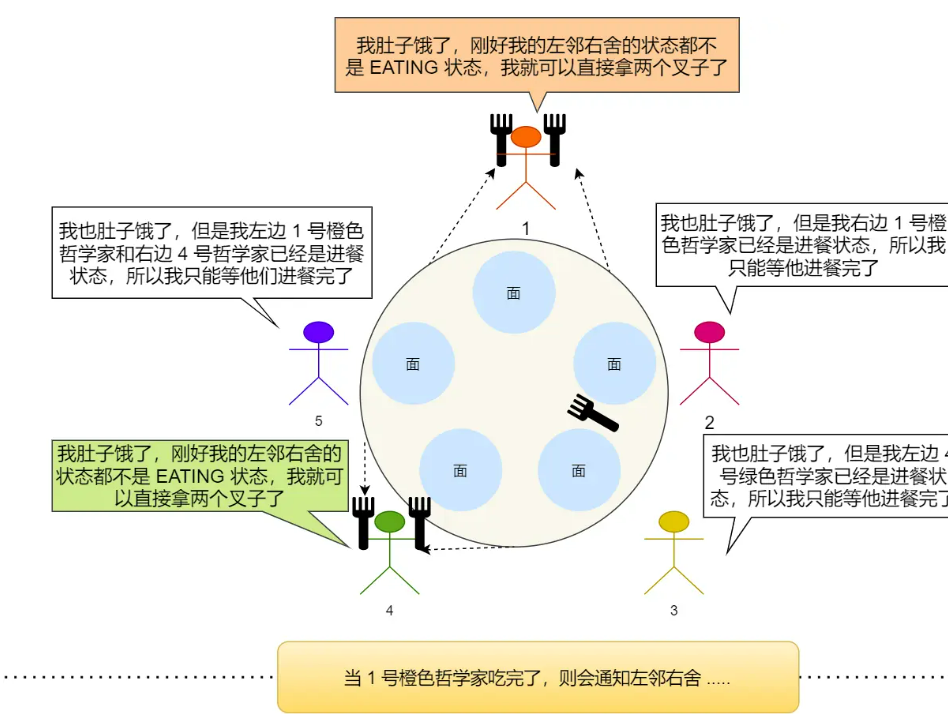
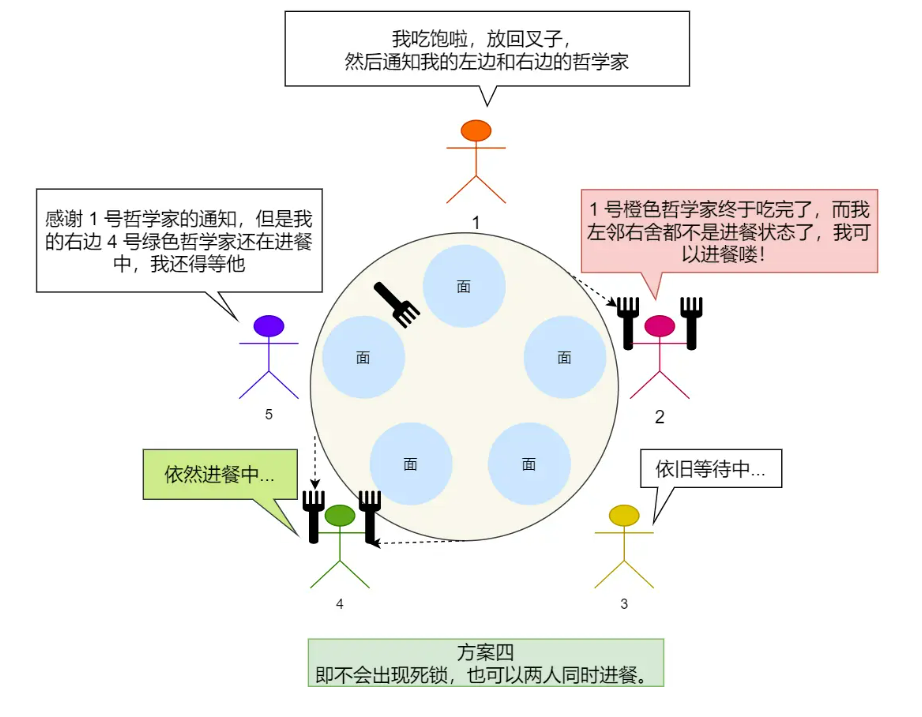
方案四同樣不會出現死鎖,也可以兩人同時進餐。
讀者-寫者問題
前面的「哲學家進餐問題」對于互斥訪問有限的競爭問題(如 I/O 設備)一類的建模過程十分有用。
另外,還有個著名的問題是「讀者-寫者」,它為數據庫訪問建立了一個模型。
讀者只會讀取數據,不會修改數據,而寫者即可以讀也可以修改數據。
讀者-寫者的問題描述:
- 「讀-讀」允許:同一時刻,允許多個讀者同時讀
- 「讀-寫」互斥:沒有寫者時讀者才能讀,沒有讀者時寫者才能寫
- 「寫-寫」互斥:沒有其他寫者時,寫者才能寫
方案一
使用信號量的方式來嘗試解決:
- 信號量?
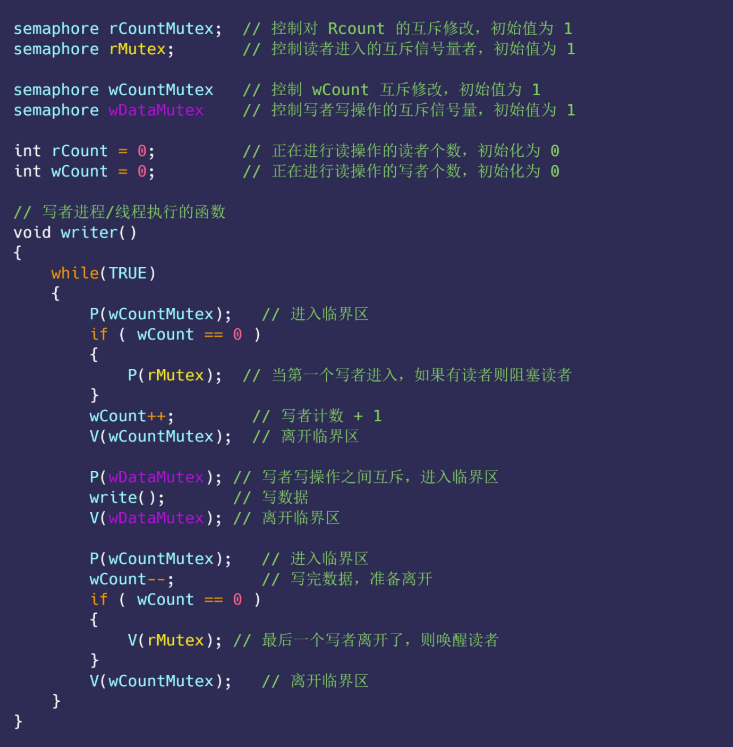
wMutex:控制寫操作的互斥信號量,初始值為 1 ; - 讀者計數?
rCount:正在進行讀操作的讀者個數,初始化為 0; - 信號量?
rCountMutex:控制對 rCount 讀者計數器的互斥修改,初始值為 1;
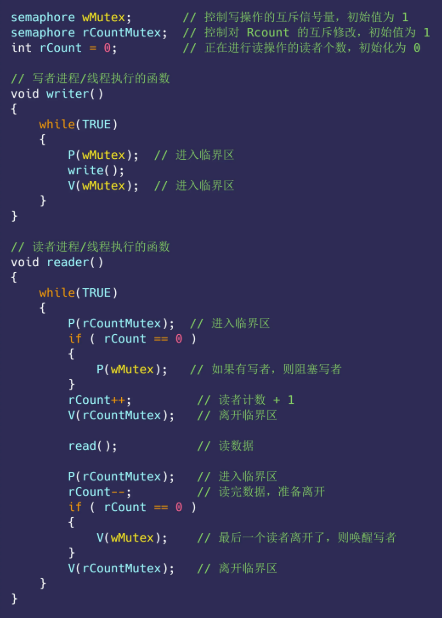
上面的這種實現,是讀者優先的策略,因為只要有讀者正在讀的狀態,后來的讀者都可以直接進入,如果讀者持續不斷進入,則寫者會處于饑餓狀態。
方案二
那既然有讀者優先策略,自然也有寫者優先策略:
- 只要有寫者準備要寫入,寫者應盡快執行寫操作,后來的讀者就必須阻塞;
- 如果有寫者持續不斷寫入,則讀者就處于饑餓;
在方案一的基礎上新增如下變量
- 信號量?
rMutex:控制讀者進入的互斥信號量,初始值為 1; - 信號量?
wDataMutex:控制寫者寫操作的互斥信號量,初始值為 1; - 寫者計數?
wCount:記錄寫者數量,初始值為 0; - 信號量?
wCountMutex:控制 wCount 互斥修改,初始值為 1;
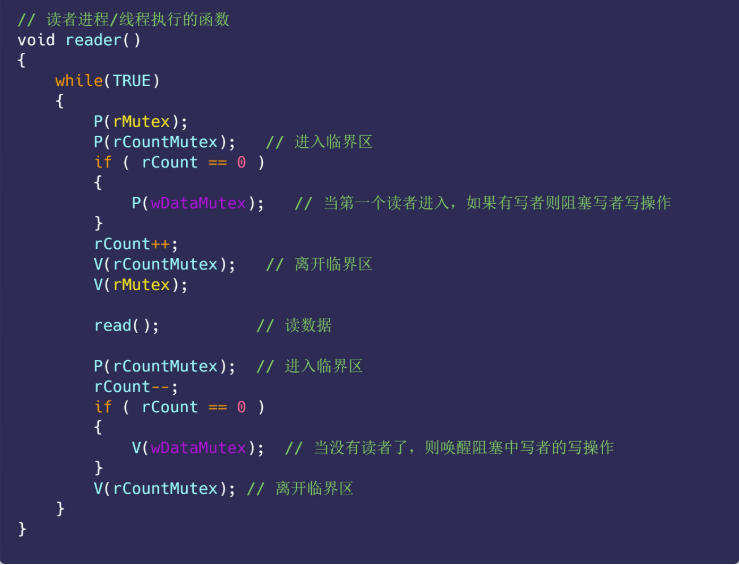
注意,這里?rMutex?的作用,開始有多個讀者讀數據,它們全部進入讀者隊列,此時來了一個寫者,執行了?P(rMutex)?之后,后續的讀者由于阻塞在?rMutex?上,都不能再進入讀者隊列,而寫者到來,則可以全部進入寫者隊列,因此保證了寫者優先。
同時,第一個寫者執行了?P(rMutex)?之后,也不能馬上開始寫,必須等到所有進入讀者隊列的讀者都執行完讀操作,通過?V(wDataMutex)?喚醒寫者的寫操作。
方案三
既然讀者優先策略和寫者優先策略都會造成饑餓的現象,那么我們就來實現一下公平策略。
公平策略:
- 優先級相同;
- 寫者、讀者互斥訪問;
- 只能一個寫者訪問臨界區;
- 可以有多個讀者同時訪問臨界資源;
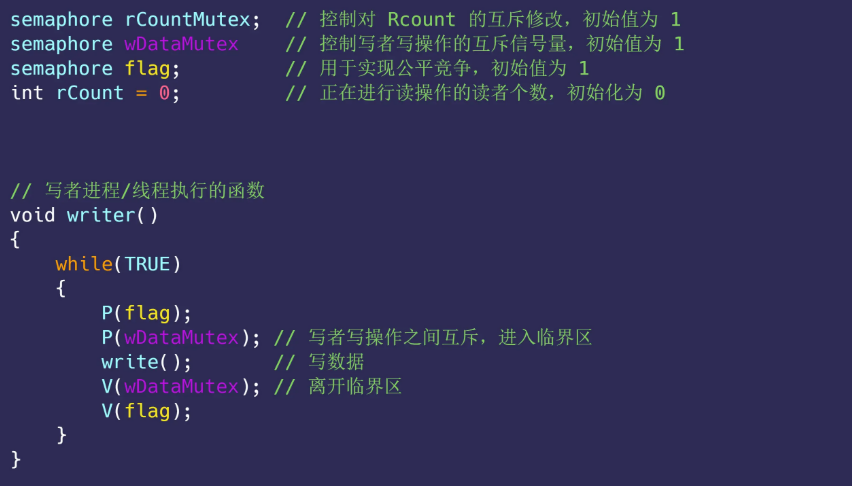
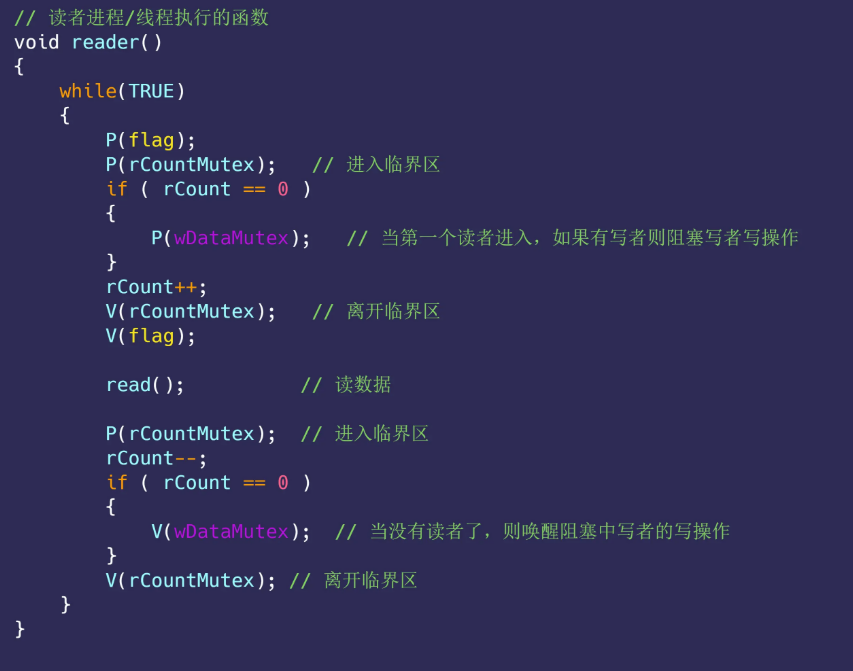
開始來了一些讀者讀數據,它們全部進入讀者隊列,此時來了一個寫者,執行?P(falg)?操作,使得后續到來的讀者都阻塞在?flag?上,不能進入讀者隊列,這會使得讀者隊列逐漸為空,即?rCount?減為 0。這個寫者也不能立馬開始寫(因為此時讀者隊列不為空),會阻塞在信號量?wDataMutex?上,讀者隊列中的讀者全部讀取結束后,最后一個讀者進程執行?V(wDataMutex),喚醒剛才的寫者,寫者則繼續開始進行寫操作。











、Rancher 和 Podman 的異同點分析)







