多傳感器融合與視覺慣性導航技術(VINS)取得了顯著進展。近期,研究人員通過優化視覺與慣性傳感器數據的融合算法、引入深度學習技術以及改進系統架構,顯著提升了VINS在復雜環境下的定位精度和魯棒性。基于深度學習的特征提取方法能夠更準確地識別視覺信息中的關鍵特征,而改進的非線性優化框架則進一步增強了系統對動態環境和快速運動的適應能力。
這些創新不僅為無人機自主飛行、機器人導航和自動駕駛等應用提供了更可靠的導航解決方案,也為未來智能系統的開發奠定了堅實基礎。我整理了10篇【視覺慣性導航技術】的相關論文,全部論文PDF版,工中號 沃的頂會?回復“VINS”領取.
PE-VINS:Accurate Monocular Visual-Inertial SLAM with Point-Edge Features
文章解析?
文章提出PE-VINS,通過引入邊緣特征改進單目視覺慣性SLAM系統。經實驗驗證,該系統在定位精度和效率上表現出色,為相關領域提供了新的技術方案。
創新點?
提出PE-VINS系統,融合點和邊緣特征,緊密結合點、邊緣和IMU測量,提升實時定位精度。
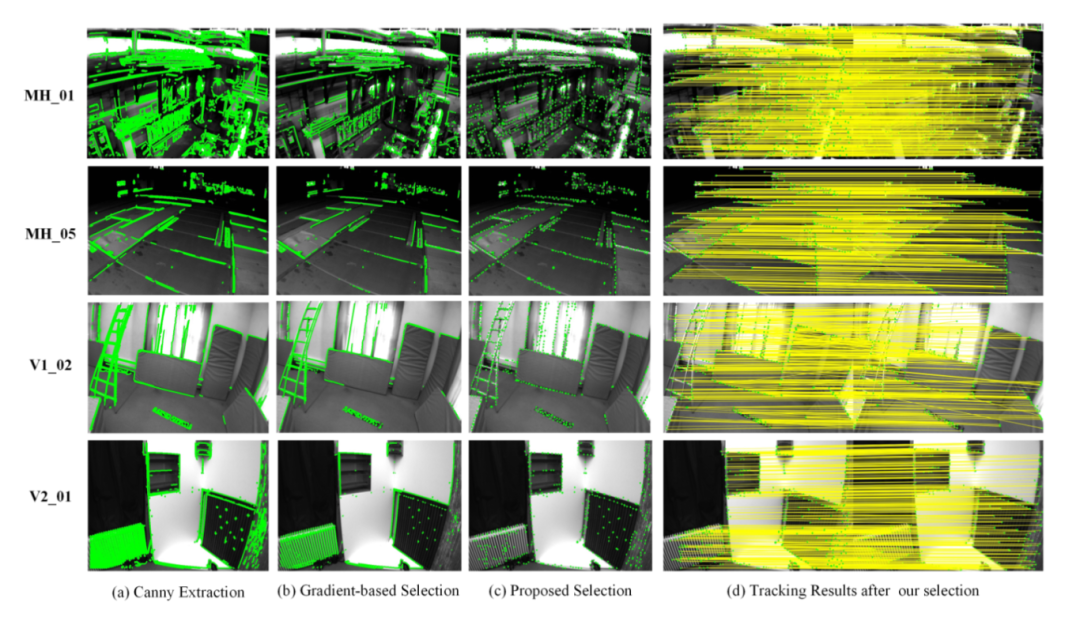
基于圖像梯度和熵增加開發邊緣選擇方法,篩選對姿態估計有益的邊緣特征。
設計適合邊緣特征的殘差公式,兼顧邊緣位置和方向,且計算成本低。
研究方法?
基于ORB-SLAM3構建系統框架,包含跟蹤、局部建圖和回環檢測線程。
利用Canny算法提取邊緣,通過新的邊緣選擇方法篩選特征,用稀疏光流跟蹤并三角化。
構建新的邊緣殘差公式,并與視覺和IMU殘差緊密耦合進行優化。
在公開數據集和真實環境中實驗,對比多種VINS方法,評估PE-VINS性能。
研究結論?
新的邊緣選擇方法和殘差公式有效,降低了時間成本,提高了定位精度。
在EuRoC和TUM-VI數據集上,PE-VINS相比8種基線方法取得了最優定位結果。
真實實驗驗證了PE-VINS的實用性,但3D邊緣特征利用和地圖維護存在局限,有待改進。
Is Iteration Worth It? ?Revisit Its Impact in Sliding-Window VIO
文章解析?
文章圍繞滑動窗口視覺慣性里程計(VIO)中迭代算法的影響展開研究,分析不同算法性能,結合實驗結果探討迭代與濾波方法的適用場景,為VIO設計提供指導。
創新點?
首次全面研究滑動窗口VIO中迭代算法的影響,分別分析IMU和相機測量的重新線性化對系統性能的作用。
綜合考慮系統可觀測性和測量過程等關鍵因素,深入理解VIO估計器行為。
給出在迭代算法應用中平衡精度和計算效率的實用準則和見解。
研究方法?
構建包含濾波、迭代濾波和全優化的迭代估計系統,并應用FEJ方法。
基于OpenVINS模擬室內數據集,設置不同參數進行標準案例的參數敏感性分析。
模擬丟失特征跟蹤、不準確系統初始化等現實挑戰場景,評估算法性能。
對比順序和批量測量處理方法,通過實際測試驗證研究結果。
研究結論?
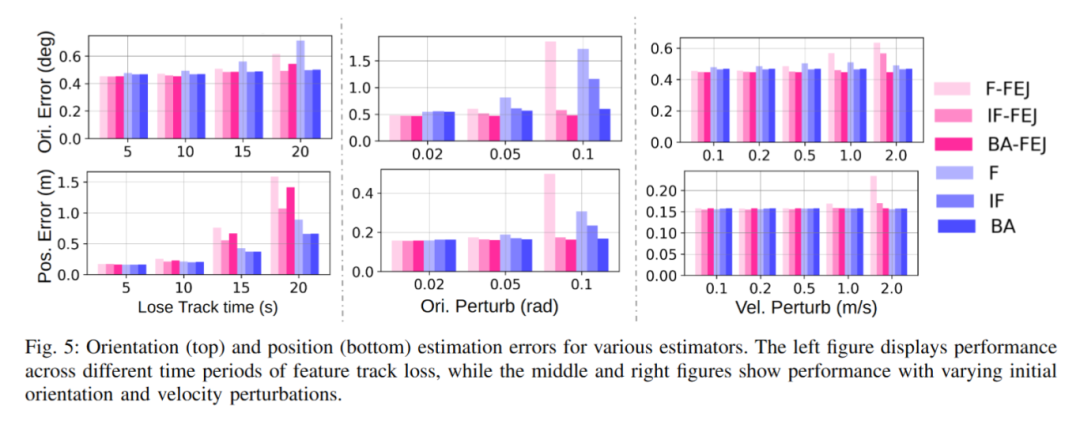
多數實際場景下,濾波方法與迭代方法性能相近,迭代方法改進有限。
濾波方法的性能受初始狀態估計精度影響大,準確的初始化很重要。
系統面臨挑戰、初始條件不佳時,迭代有助于提升性能,如加速收斂。






![[論文閱讀] 人工智能 + 軟件工程 | 開源軟件中的GenAI自白:開發者如何用、項目如何管、代碼質量受何影響?](http://pic.xiahunao.cn/[論文閱讀] 人工智能 + 軟件工程 | 開源軟件中的GenAI自白:開發者如何用、項目如何管、代碼質量受何影響?)












![[Element]修改el-pagination背景色](http://pic.xiahunao.cn/[Element]修改el-pagination背景色)